TRANSVERSE AND LONGITUDINAL STABILITY
Ranger Hope © 2008, contains edited material courtesy of A.N.T.A publications.
Transverse Stability
Centres of Buoyancy and Gravity
Transverse Stability
Centres of Buoyancy and Gravity

Figure 1
The drawing above shows a transverse section through a vessel.
WL represents the waterline at which the ship is floating.
K is the keel.
B is the position of the transverse centre of buoyancy usually just called the centre of buoyancy. This is the centre of the underwater volume of the vessel. It is the point through which the force of buoyancy supporting the vessel acts vertically upwards.
G is the position of the transverse centre of gravity. It is the point through which all of the weight of the vessel including deadweight items can be considered to act vertically downwards.
When the vessel is upright, both the centre of buoyancy and the centre of gravity are on the centre line of the vessel.
Movement of Centre of Buoyancy
The centre of buoyancy is the centre of the underwater volume of the vessel. As the vessel sinks deeper in the water, the centre of buoyancy will rise higher as shown in Fig 2.

Figure 2
When the vessel is floating at waterline W1L1, the centre of buoyancy is at B1. If the ship sinks to waterline W2L2 then the centre of buoyancy will rise to B2, still on the centre line.
Movement of Centre of Gravity
The centre of gravity can be imagined to be a point, through which all of the vessel’s weight acts vertically downward.
The centre of gravity of the vessel at light displacement is fixed by the arrangement of hull, superstructure, machinery, etc. The addition of deadweight items such as fuel, cargo, etc. causes the centre of gravity to move in various directions. Therefore the position of the centre of gravity is dependent upon the size of weights added to the vessel, and the position in which they are added. In other words, the final position of the centre of gravity is dependent upon the practices of the vessel operator.
The following three rules describe the movement of the centre of gravity of the vessel.
(1) The centre of gravity moves towards an added weight. See Fig 3.

Figure 3 - Weight Added
(2) The centre of gravity moves away from a discharged weight. See Fig 4.

Figure 4 Weight Removed
(3) The centre of gravity moves parallel to the movement of a weight which is already on board. See Fig 5.

Figure 5 Shifting Weights
The size of the movement of the centre of gravity is directly dependent upon:
(1) The size of the weight involved;
(2) The distance between the centre of gravity of the vessel and the centre of gravity of the weight.
(3) The displacement of the vessel.
Suspended Weights
When a weight is suspended, from a boom for example as shown in Fig 6, the effect is as though the weight were situated at the point of suspension, that is, the
head of the boom. Usually, this is a long way from the centre of gravity of a vessel and therefore, a suspended weight may cause a large movement of the centre of gravity.

Figure 6 Suspended Weight
Previous diagrams showed a transverse view of a vessel in an upright position, with the centre of gravity and the centre of buoyancy on the centre line. It was said that all of the weight of the vessel, and any associated deadweight items, can be assumed to act vertically downwards through the centre of gravity. It was also said that all of the buoyancy effect can be assumed to act vertically upwards through the centre of buoyancy; and, of course, when a vessel is floating the weight is exactly equal to the buoyancy.
When the vessel is moved away from the upright by some effect outside the vessel, e.g. a wave, the vessel is said to be heeled.
In Fig 7 the vessel has moved to an angle of heel as shown. The vessel was originally floating at waterline WL, and after heeling is floating at waterline W1L1.
Wedge 1 has come out of the water, wedge 2 which is of equal volume, has gone into the water.
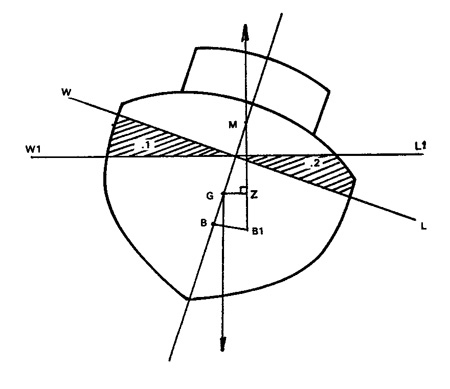
Figure 7 Vessel heeled
The centre of buoyancy (B) is the centre of the underwater volume of the vessel. Because the underwater shape has changed, the centre of buoyancy moves to the centre of the new underwater shape, which is at B1.
Buoyancy acts vertically upwards through the centre of buoyancy as shown and cuts the centre line of the vessel at a point called the metacentre (M). The initial position of the metacentre is determined by the shape of the underwater portion of the hull.
Note that the position of G has not changed, because no weights have been moved, but weight still acts vertically downwards, through G as shown.
The distance from G to M is called the metacentric height.
Fig 8 shows an expanded view of the relationship between B, B1, G, Z and M. The lines of action of weight and buoyancy are separated by a distance GZ, this is called the righting lever
Imagine that GZ was a solid lever fixed in the centre of the ship. The whole weight of the ship pushes down through G. The force of buoyancy (which is equal to the weight) pushes upwards through Z.

Figure 8 Righting Lever
What happens to the lever GZ? In this case it experiences a force (turning moment) tending to rotate it in an anti-clockwise direction. This turning moment has the effect of rotating the whole ship is an anti-clockwise direction. (The lever is fixed remember). Now look at Fig 7 again. An anti-clockwise rotation would return the ship to the upright position. As that happened, B would once again be vertically under G, and the righting lever would disappear, since a righting lever only exists when B is not directly underneath G.
Equilibrium is the term used to describe a vessel that is afloat. It is a word made up of two words namely equal, and balance. A vessel will float when the forces of weight and buoyancy are equal, and they balance - that is both B and G are in the same vertical line, and the vessel is not being acted on by an external force (a force other than buoyancy or weight).
Stable Equilibrium
A vessel which will tend to return to the upright after being heeled by an external force, is said to be in stable equilibrium. When G is below M the vessel is in stable equilibrium e.g. the situation shown in Fig 7.
Unstable Equilibrium

Figure 9 Unstable Equilibrium
If G is above M as shown in Fig 9 the ship is said to be in unstable equilibrium. It will not remain upright. It will heel to an angle called an angle of loll. At that angle of loll it will have ‘picked up’ stability and will return to the angle of loll if disturbed by an external force. If G is sufficiently far above M, then the angle of loll may be very large and the vessel may capsize. Angle of loll is described below.
Neutral Equilibrium
If G and M coincide, as shown in Fig 10 then, theoretically the vessel will have no reason to remain upright. Also, if it is heeled, it will have no tendency either to heel further or to return to the upright. This unsafe state is called a loll.

Figure 10 Neutral Equilibrium
In order that a vessel is able to float upright the centre of gravity and the centre of buoyancy must be on the centre line. The buoyancy and weight are then equal in size and are acting along the same straight line but in opposite directions. See Fig 11.

Figure 11 Without List
If weights are loaded or discharged or moved within the vessel G may move off the centre line.

Figure 12 G Located Off Centre Line
The buoyancy and weight are not acting along the same straight line shown below in Fig 12. The vessel will tend to take up an angle of list as shown in Fig 13.

Figure 13 Vessel Listed
As the vessel lists B will move until it is vertically below G at B1. Then buoyancy and weight will be acting along the same straight line and the vessel will come to rest at an angle of list. An angle of list may be removed by moving weights so that G moves back onto the centre line.

Figure 14 Stable Equilibrium
Fig 14 shows a vessel in a stable condition. This is the only condition in which any vessel should be operated.
The way in which the vessel returned to the upright was illustrated in Fig 37 and 8. In general, the bigger the righting lever, the more stability a vessel will have.
The size of the righting lever is dependent upon the position of G.
In Fig 15 it can be clearly seen that G1Z1 is smaller that GZ and G2Z2 is bigger than GZ.
Also, G1M is smaller that GM, and G2M is bigger than GM. In fact the size of GM and GZ are related. The bigger the GM the bigger the GZ.

Figure 15 GZ is determined by position of G
If a vessel has a lot of stability i.e. if it has a big GZ and GM then it will tend to roll quickly, and perhaps uncomfortably, it is said to be 'stiff'
If a vessel has a small measure of stability, i.e. if it has a small GZ and GM then it will roll slowly and easily, it is said to be tender.
After heeled by wave action a vessel will start to roll. Every vessel has its own natural roll period (the time that it takes to roll from upright, over to the left, then to the right and finally back to the upright). The period of the roll is determined by:
(i) the metacentric height (the length of the vessel’s GM)
(ii) the vessels shape (beam and length)
If the GM is large, the roll period is short (the vessel is stiff). If the GM is small, the roll period is long (the vessel is tender). If the vessel is overloaded with G above M (negative GM) the vessel is unstable. Masters are well advised to continuously monitor this indicator of stability, particularly in vessels that load at sea (fishing vessels) or damaged vessels that are taking on water.
Initial surveyors traditionally conducted a rolling test on small vessels to assess righting ability and obtain approximations of GM. While testing, the boat is in smooth water without wind and tide, with slack moorings and adequate side and bottom clearance. All loose weights are secured and all slack tanks pressed up. A roll is initiated, perhaps by pulling on a masthead line from the wharf, and when the vessel is rolling freely, several rolls are timed, and averaged.
An approximate value for the GM in metres may then be found from the formula:

where: B is the beam of the vessel in metres
T is the seconds for a complete roll (upright, port, starboard, port, upright).
F is a factor allowing for a vessel’s individual shape (typically 0.73 - 0.98)
Example: A vessel has a factor of 0.88, a beam of 12 metres and a roll period of 18 seconds. What is the vessel’s GM?


While roll period calculation must not be relied on to determine safe loading (the vessels stability book provides this information) it is a good indicator of stability. You should time your vessel’s roll period in different conditions of safe loading, and thereafter be aware of the feel of your vessel. If the roll period seems longer, or if the roll becomes sluggish, investigate the cause immediately.
The distribution of deadweight items within a vessel is the responsibility of the operator. It is normal for vessels to be stable and upright in their lightship condition. Therefore, if a vessel is unstable or listed, after the addition of deadweight items, it can be corrected by the action of the operator.
(1) G moves towards a loaded weight.
(2) G moves away from a discharged weight.
(3) G moves parallel to a shifted weight.
(4) A suspended weight acts as though it is located at the point of suspension.
Also:
(1) Stability improves if G is lowered.
(2) Stability gets worse if G is lifted.
(3) Free surface effect makes stability worse.
Therefore stability is improved if:
(1) Weights already on board are lowered.
(2) Weights are added low down.
(3) High weights are removed.
(4) Suspended weights are lowered.
(5) Tanks are kept completely full or completely empty.
Stability is worsened if:
(1) Weights already on board are lifted higher.
(2) Weights are added high up in the vessel.
(3) Weights are removed from low down in the vessel.
(4) Weights are lifted on booms etc.
(5) Many tanks have free surfaces.
Calculating Loading and Unloading of weights:
The amount that the centre of gravity of a vessel is shifted by the loading of a weight can be calculated by the formula:

The amount that the centre of gravity of a vessel is shifted by the unloading of a weight can be calculated by the formula:

Parameters such as centre of gravity and centre of buoyancy have been used in describing transverse stability, so far. They can also be used to describe longitudinal stability.
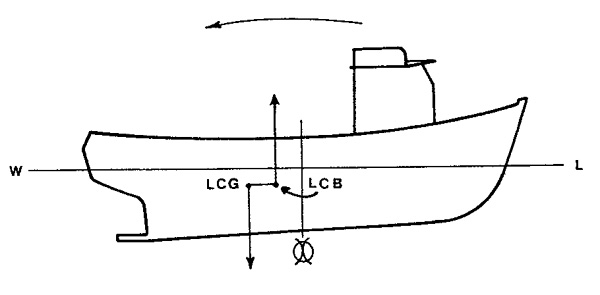
Figure 16 LCB Forward of LCG - Vessel trims by the stern
In Fig 16 LCB is the longitudinal centre of buoyancy. This is the longitudinal centre of the underwater volume, and is the point through which all the buoyancy can be said to act vertically upwards.
LCG is the longitudinal centre of gravity. This is the point through which all of the weight of the vessel can be said to act vertically downwards.
If the position of LCG and LCB are as shown in Fig 16 then the actions of buoyancy and weight will cause the vessel to rotate as shown by the arrow. The stern will sink deeper, the bow will rise higher. LCB is the longitudinal centre of all underwater volume. As the vessel rotates, the shape of the underwater volume will change and LCB will move to the new centre.
When LCG and LCB are in the same vertical line, the rotation will stop, the vessel will be trimmed by the stern as shown in Fig 3.17.

Figure 17 LCG and LCB in same vertical line - no trimming moment
If the vessel had started with LCB aft of LCG as shown in Fig 3.18 then the rotation would cause a trim by the bow.
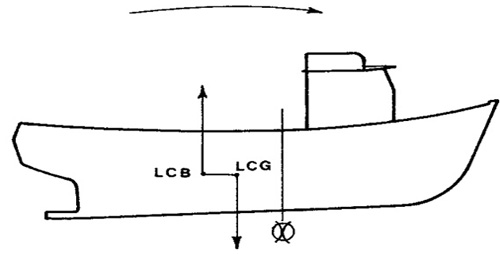
Figure 18 LCB aft of LCG - vessel trims by the head
Vessels are not generally symmetrical fore and aft, so they do not necessarily rotate about amidships when trimming. In fact, they rotate about a point called the longitudinal centre of flotation (LCF). LCF is the centre of the shape of the waterline at which the vessel is floating. See Fig 19.

Figure 19 LCF
Calculating Loading and Unloading of weights:
The amount that the centre of gravity of a vessel is shifted by the loading of a weight can be calculated by the formula:

The amount that the centre of gravity of a vessel is shifted by the unloading of a weight can be calculated by the formula:

Simplified Stability Data
Much of the information discussed in earlier sections of these notes can
be found in the Simplified Stability Information Booklet that may be provided
on your vessel.
Stability
Booklet
The booklet is set out in an approved format and contains the following information.
1. The vessels name, official number, port of registry, gross and net tonnages, dimensions, operating displacement, deadweight and draught.
2. A profile view of the vessel showing and naming all compartments, including tanks.
3. The capacity and the centre of gravity, vertical and longitudinal, of all spaces used to carry fish, water, fuel, stores etc.
4. Tank calibrations for every tank holding 2 tonnes or over, plus the free surface effect of every tank.
5. Information about the following hydrostatic particulars.
(a) Displacement in salt and fresh water.
(b) K M
(c) T P C
(d) L C B
(e) L C G
(f) Trim information
These values are recorded for various draughts.
6. Sample loading conditions such as Lightship, Loaded departure from port, worst operating condition, etc.
7. Guidance notes and warnings dealing with such things as recommended distributions for fuel, water, cargo etc., recommended operating procedures and warnings about dangerous practices.
The purpose of this information is to let the master of the vessel know under what conditions the vessel will have sufficient stability. If you operate a vessel so that its condition is better than the worst condition that is still safe, then you will know that your vessel has sufficient stability for normal conditions.
The following rules for safer stability are taken from MV “Twosuch” simplified stability booklet.
The sheets which follow are general comments to enlarge on good seamanship and house-keeping and issued only to enable the operators to use the stability data to best advantage.
Tank Usage and Slack Tanks
(1) Tanks which are not in use, must at all times be full and pressed up, or empty where possible. Remember that slack tanks create free surface and the effect of slack tanks results in actual and often large reductions of stability.
(2) When manipulating tank contents by pumping from one tank to another, make every effort to maintain level trim. Develop a system of tank usage which keeps the trim of the vessel from becoming excessive. Remember that the calculations for stability are accurate only within a small range of trim.
(3) Transference of fuel or fresh water and the ballasting of tanks should only be carried out in favourable weather conditions.
(4) There is in this book a recommended sequence for the use of liquids in tanks, departure from which may be dangerous. These recommendations should be followed unless there are specific reasons at the time for not doing so.
(5) Occasionally, conditions of loading and tank manipulations can lead to trim by the bow. This can be avoided by coordinating the operations; in other words, the effects of loading can be offset by correctly manipulating the contents of the tanks.
(6) Excessive trim by the bow can lead to difficulties in handling the vessel and may result in poor seakeeping.
Water On Decks
Large amounts of water on decks raise the centre of gravity of the vessel and drastically reduce its stability.
(1) Shipping large amounts of water should be avoided by good seamanship.
(2) It is essential to allow quick drainage for any water on decks by keeping the freeing ports uncluttered and free from obstructions at all times.
Free Surface Effects
The effect of Free Surface of liquids is to raise the Vertical Centre of Gravity, therefore reducing stability.
(1) On Deck
Do not allow water to accumulate on main deck or upper deck.
(2) In Tanks
The number of slack tanks at any one time should be kept to a minimum. To restrict the amount of Free Surface, it may be necessary to transfer liquids between tanks, bearing in mind the trim required and the weather conditions at the time.
Effect of Wind and Waves
High speed wind and gusts can cause a considerable angle of heel, especially for vessels with large superstructures, thus reducing the range of stability. The situation can become serious, particularly in heavy and confused seas.
In heavy weather, make sure that all manoeuvres are carried out in accordance with the best practice of seamanship.
Weathertight Integrity
In severe weather, it is the responsibility of the Master and Crew to ensure that all hull, deck and superstructure openings are closed and watertight as far as is practicable. In emergency conditions, all openings must be closed, particularly weathertight doors, hatches and ventilation trunks and only opened at the Master’s discretion.
General Comments
(1) Always determine the cause of a list or a change of trim of the vessel.
(2) Heavy rolling of the vessel should be regarded as a potential hazard. Oblique seas, particularly from astern, reduce the average stability below that calculated on the sheets in this book.
The most undesirable condition occurs when a wave crest is amidships and when running before a high following or quartering sea.
Rolling becomes more violent when seas approach the vessel at about 15 degrees aft the beam.
(3) Fish or cargo shall be properly secured against shifting which could cause dangerous trim or heel of the vessel.