RADAR
AND ELECTRONIC NAVIGATION AIDS
.......(View as a Pdf)
(Contains
extracts courtesy of A.N.T.A. and Col Tritton)
Power
Supply
Transmitter
Waveguide
Scanner
Time
Base Unit
Receiver
Display
unit or PPI
Colour
Displays
LCD
Display
Interfacing
and interlacing
Power/standby/transmit
Brilliance
Gain
Heading
marker
Range
Tuning
Anti-sea
& rain clutter
Interference
rejection
Echo
enhancement
Heading
marker and range rings
Pulse
length control
Off
centring
Turning
on, tuning in, switching off
Incorrect
adjustment
SHU - Relative
motion unstabilised display
CU - Relative
motion course-up stabilised display
NU - Relative
motion north-up display
TM - True
motion display
5. Radio propagation and radar
performance
The
radio wave
Marine
radar types
Radar
transmissions
Target acquisition
Navigational aids
Performance monitoring
False
echoes
Beamwidth distortion
Range
and bearing discrimination
Bearings
Ranges
Position fixing
Pilotage
Early
warning of risk of collision
Relative
Motion
Plotting
9. Automatic Identification Systems (AIS)
External
link
10. Electronic chart display information systems (ECDIS)
External
link
Introduction
The first time I shipped with radar was a
revelation to me. Where previously night navigation and out of sight of land
required careful plan and anxious hope, now the ship appeared as if on a map,
and better still the many approaching dangers beyond sight were
highlighted. Radar can pierce darkness,
rain, fog, and weather. It can, when within range, show ships, aircraft,
storms, islands, headlands and prominent landmarks. But here lies its great
advantage and disadvantage, as with reliance on any radio aid – if tuned and
interpreted properly you find a signal, but if not, you get nothing. You can falsely
assume that nothing displayed indicates that nothing is there. The purpose of
this text is to explain how to tune a radar set, maintain the display for
optimum performance and to interpret the information displayed.
The name radar comes from “radio detecting
and ranging”, a system that Scotsman Robert Watson-Watt patented in 1935.
During World War II, from a shed facing the North Sea so bristling with
electromagnetism that his hair stood on end, my father in law operated the
prototypes that successfully warned of enemy aircraft attack. Squeezing the
360º radio wave propagation into a narrow beam remains only partially achieved
requiring dangerously high microwave energy.
However trials have improved radar so much that it is now standard
equipment on vessels.
Radar now enables range and bearings for position fixing, navigational aids, collision avoidance and search and rescue devices. However, in order to safely operate the master is responsible to correctly use all electronic instrumentation and understand its limitations, including radar.
1. Radar equipment
Radars transmit directional microwave radio pulses with a rotating ariel (the scanner) in a 360º circle around the machine. It detects the bearing and range of echoing pulse returns from significant surrounding targets to produce a map like display.
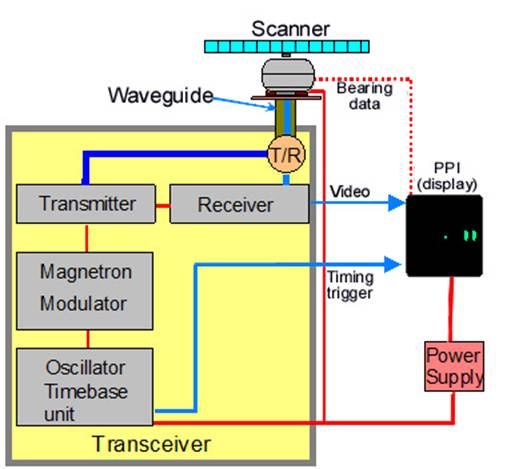
Power Supply
Considerable power is required by a radar for
transmit mode, of up to 400 watts even in the smaller sets. The supply is
usually a small solid state power pack or motor alternator or a generator with
larger sets.
Transmitter
Super high frequencies of electromagnetic energy
waves (3000 to 10000 MHz, these are wavelengths of 10 and 3 cm, respectively)
are produced in the oscillator. The operating cycle of the oscillator is
initiated by the trigger, which determines the pulse repetition frequency
(PRF). The pulses are shaped in the modulator, which determines the pulse
length, then passed to the magnetron, which converts the energy into radio
waves and determines the radar frequency. They are then passed to the
transmitter, which in modern radars is usually combined with the receiver (the
transceiver). The transceiver is usually located within the scanner unit.
Waveguide
The pulses are transmitted to the scanner unit by
the waveguide. A waveguide is hollow copper tubing, usually rectangular in
cross section, having dimensions according to the wavelength of the carrier
frequency. An electronic switch in the waveguide, called the transmit/receive
cell (T/R) isolates the receiver during transmission to protect it from the
high power of the transmission. In modern radars the waveguide and the T/R
switch are usually located within the scanner unit.
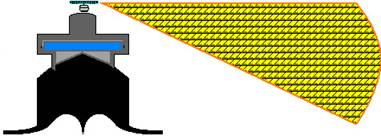
Scanner
The most common type of radar aerial, the open
array scanner is shown below.

Scanner can be housed within a radome
as below. This particularly suits yachts as the rotating scanner can turn
without fouling sails and rigging.

The scanner unit radiates the radar pulses and
passes returning target echoes to the receiver. The scanner also focuses the
outgoing microwaves into a tight beam in much the same way as a torch reflector
focuses the light from a bulb. This is done in most marine radars by feeding
the microwaves into a hollow tube inside the rotating scanner, which is also
called a waveguide. The waveguide is sealed at both ends but has a series of
small slots in one side. Each slot acts like a small aerial but their combined
effect is to focus the microwaves into a narrow beam. This type of scanner is
called a horizontal slotted waveguide.
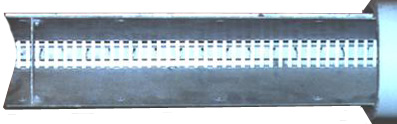
The
length of the scanner will determine the radar’s horizontal beamwidth
(HBW). A wider scanner will result in a narrower beamwidth
which will produce better bearing discrimination. The inside of a horizontal
slotted radar scanner is shown below.
In every revolution of the scanner, radar pulses
hit the target not once but many times during the time it is aimed at the
target. The effect on the screen is cumulative, the more hits the brighter the
target appears on the screen. Should insufficient pulses hit the target only a
weak echo will be displayed and it will disappear quickly.
The number of scanner revolutions should be between 20 and 30 revolutions per
minute in order to both display the target brightly and prevent the
disappearance of the picture between scanner revolutions. Most scanners operate
at 24 rpm.
A more recent innovation is the patch aerial. This
aerial uses a printed circuit consisting of an array of copper pads, to focus
the beam.
Time Base Unit
With an analogue radar, a
motor rotates the scanner at approximately 24 rpm and a signal from the time
base unit to the display unit causes the trace to rotate in synchronisation
with the scanner. As the scanner passes the fore-and-aft line, a heading marker
will appear on the display. Digital radars use microprocessors to add heading
and timebase information to the display.
Receiver
The receiver unit detects incoming echoes which are
at more or less the same frequency as the outgoing frequency and mixes them
with a signal from the local oscillator to reduce them to an intermediate
frequency, usually about 60MHz. The signal is then amplified by the IF
amplifier, weaker distant targets are amplified more than stronger/closer
targets and is passed to the video amplifier, which converts the signal to a
suitable form for video display. The signals are then passed on to the display
unit, with the addition of range and bearing marker signals. The receiver in
modern radars is combined with the transmitter and called the transceiver. It
is usually located within the scanner unit.
Display
unit or PPI
Analogue type (older) radars consist of a cathode
ray tube (CRT), the face or screen of which is commonly referred to as the
scope, and various timing circuits and controls. In the scope a stream of
electrons is directed towards a fluorescent screen. The phosphorus glows when
illuminated by the electrons, while internal circuitry forms the trace or
sweep. A beam begins at the centre and sweeps out again and again, each sweep
corresponding to the progress of a microwave pulse going out and back, and each successive sweep moving a little further
around the screen in time with the rotating scanner. A returning echo is added
to the sweep signal so that the screen is more brightly illuminated (painted) at
a point corresponding to the bearing and range of the targets echo. This
produces a very clear but very dim picture and the scope is fitted with a cowl
to allow daylight viewing. This presentation is called a Plan Position
Indicator (PPI).

The diagram above shows a cathode ray tube (CRT)
using magnetic deflection obtained from coils placed around the neck of the CRT-other
CRT’s use electrostatic deflection, by use of deflection plates.
Modern
displays units, called rasterscan radars (colour
radar) use microprocessors to analyse echo range and bearing and present like a
TV. The rasterscan picture (paint) is rectangular
rather than a circular. In rasterscans there is no
rotating trace, instead the echo is digitalised and painted line by line across
the screen (called interlacing). As the sweep moves across the screen the
pixels (picture cells) are illuminated and can be further electronically
enhanced in colour or duration of illumination. A small rasterscan
radar is shown below.

To obtain a sharp image a high resolution is
required. Resolution is measured by the density of the pixels, the more pixels
per square inch the higher the resolution. A common radar display resolution of
640480 means that the screen consists of 640 columns by 480 rows of dots, that
is, 640 x 480 = 307,200 pixels.
Pixels are electronically refreshed or updated so
they will remain bright, at a rate of about 30 or more times each second.
Displays may be interlaced or non-interlaced. Interlaced displays do not draw
the entire picture in one pass. On the first pass, it draws every other line
and draws the remaining lines on the second pass. Non-interlaced displays will
therefore be more stable.
On
early model rasterscan radars piccolos were either on
or off, which meant that there was no visible difference between a weak echo
and a strong one. This could result in weak echoes like rain clouds completely
blocking out the display and masking targets within the blocked out display.
Later models have multi-level quantisation displays, in which each pixel can
operate at several levels of monochrome, which allows the operator to
distinguish between a weak and a strong echo. On modern rasterscan
radars remote displays or full dual displays units are available.
Most radars produced for small
craft today have a green and black monochrome quantised display. However, some
of the larger more expensive radars feature full colour displays.
Colour Displays
Colour radars offer several different formats, with
up to four different colours. Multi-level monochrome displays can display 16
levels of quantisation in yellow or green. Or multicoloured displays can
identify the echo’s relative strength and display the echoes as different
colours (green, yellow and red) on the display. A drawback with this type of
display is that the operator’s attention is drawn to the red echoes while
weaker less intense echoes, but possibly more significant echoes, are ignored.
Colour technology provides valuable information such as filtering out fog,
rain, etc, and is preferred by many operators.

Other colour displays use colour to differentiate
between genuine targets and display information, EBLs and VRMs, etc. Still
others apply colour to targets to increase their contrast, usually a
yellow-orange colour for targets and a different colour for display
information.
Probably the best feature of colour radars is their
ability to select the background colour. In daylight a blue background would
usually be selected as the display is easy to read in bright sunlight. While at
night most operators would select a black background as it reduces glare,
preserving night vision.
Below is shown a Furuno 72 mile analogue radar. The scope radars are
characterised by their circular display and daylight viewing hood.

LCD Display
Another type of modern presentation is the LCD
(liquid crystal display). LCD displays use rasterscan
technology to create the picture. But, instead of using a CRT, LCD radars use
an array of liquid crystal diodes, sandwiched between panel
of glass to produce the picture. LCD displays are lightweight and require
little power. However, they produce less contrast, produce more glare and have poorer screen resolution than CRT’s. To
overcome the contrast problem most are back lit,
allowing daylight viewing. On the other hand, CRT’s are bulky, fragile, and
consume a lot of power.

Interfacing and interlacing
Most radars today are
capable of interfacing with other navigational equipment, such as GPS,
electronic compasses, logs, sounders, weather instruments, engine instruments
and autopilots. For example, when interfaced with a GPS navigator, electronic
compass and log, the position and vector of any radar target on the screen
that has
been acquired by the ARPA (Automatic Radar Plotting Aids) can be digitally
displayed on the chart. In order to interface the instruments must be able to
communicate with each other in the same software language. To allow this most
manufacturers have adopted a standard code defined by the National Marine
Electronics Association (of

The above figure shows a north-up radar display
interfaced with the GPS and other instruments to give own ship’s position,
position of target acquired by the ARPA, SMG, CMG, waypoint information, air
temperature, sea temperature and barometer reading.
Interlacing on the other hand refers to the line by
line process by which pixels are activated in digital displays. Pixels are
electronically refreshed or updated so they will remain bright, at a rate of
about 30 or more times each second. Displays may be interlaced or
non-interlaced. Interlaced displays do not draw the entire picture in one pass.
On the first pass, it draws every other line and draws the remaining lines on
the second pass. Non-interlaced displays will therefore be more stable.
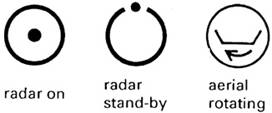
2. Basic radar controls
Shown below, the main control panel of a simple radar.

There is no standard radar control panel and even
names vary with differing brands. However, the IMO (International Maritime
Organisation) has a set of standard symbols for the most important controls,
but they may not used on all radars.

The basic controls used to tune the performance of a radar are:
- power/standby/transmit
- brilliance
- gain
- heading marker
- range
- tuning
- anti sea clutter control (STC)
- anti rain clutter control
(FTC)
Power/standby/transmit
The power/standby/transmit switch usually has three
positions. Pressing the power switch will activate the radar to standby, however it doesn’t come on immediately as the
magnetron needs a few minutes to warm up before it can transmit. The radar will
have some form of visual signal to count down this wait period, the approved
best standard being within 120 seconds. The radar can then be switched to
‘transmit’ and on some sets a short or long pulse can be selected at this time,
normally long pulse would be selected. A long pulse will be more likely to show
an echo from a weak target or a target at a longer range. A short pulse will
achieve better definition on short ranges.
As well as its main function of giving the
magnetron time to warm up, in ‘standby’ mode the scanner is not rotating (on
most sets) and is a way of conserving power and prolonging the life of the
magnetron while keeping the set ready for immediate use. It is a good practice
at sea to leave the radar on ‘standby’ at all times as this will prevent
condensation forming inside the radar set.
Brilliance

The brilliance control on an
analogue radar (old style) controls the brightness of the rotating trace
and will also affects the brightness of the displayed echo so it needs to be
adjusted so that the trace itself is just visible, to give a good contrast
between echo and background.
On a raster scan display (new style) the brilliance
control regulates the brightness of the picture (scale illumination), making it
bright enough for daylight viewing or dim enough so as not to impair the
operators night vision.
Gain

The gain control may appear to function like the
brilliance control in that it makes the picture brighter or darker, but it is
completely different so it is vital not to confuse the two. Gain affects the
receiver and not the display as the brilliance does. Turning up the gain
increases the amplification of the incoming signal, making weak echoes look
stronger, but confusing the display with background speckle or noise, similar
to the background crackling of an ordinary radio. Turning down the gain will
reduce the sensitivity of the receiver and reduce the noise, but care must be taken
not to overdo as weak or distant echoes can be lost.
Heading marker
The heading marker and the range rings can obscure
small targets. So it’s a good idea to have the range rings turned off when they
are not in use and to delete the heading marker every few minutes to see if it
is masking a small target, dead ahead. The heading marker delete control is
usually self cancelling; that is the heading marker will reappear as soon as
the button is released.
Range

The range control regulates the range at which the
set operates by changing the size or scale of the area on the display. Changing
range also affects the radar’s pulse length, PRF (pulse repetition frequency),
and video presentation.You change the range just as
you change charts for passage making or close-in piloting. For coastal
navigation you might select a range of 12 miles so that appropriate coastal
features are displayed, for collision avoidance a range 24 miles may be
appropriate, for pilotage into a confined anchorage a
range of ½ a mile may be needed.
Radars can superimpose range rings to scale the
distance of targets displayed on the PPI. A more precise feature is the
variable range marker (VRM) that enables a target to be highlighted so its
range information is displayed in print format.
Note: It is
considered good watch keeping practice to vary the range monitored, so as to
get best use of radar’s detection capability.
Tuning

The tuning control can be compared to the tuning
control of an ordinary radio, in that it tunes the receiver to the frequency of
the transmitter. Poor tuning adjustment may not be easily recognised on the
screen. Tuning slightly out will eliminate some very weak echoes, but still
produce a clear picture of the stronger ones, hence the importance of frequent
fine tuning of the set. Not all sets have a tuning control.
Sea Clutter Control (STC)

The radar beam will bounce echoes off the sea
around the ship, particularly if the weather is a little rough. This result
will be a bright sunburst pattern in the middle of the screen which will be
more pronounced in the upwind direction. You could reduce this by turning down
the gain, the down side to that solution however, is that the echoes of more
distant targets will be lost as well.
The solution is the sea clutter control. It works
by reducing the receiver gain for a few microseconds after each pulse is
transmitted, then gradually restores it to its former
level. It works very well, but its use requires care. Too much sea clutter
control will result in the loss of close range targets. At sea the sea clutter
control must be continually monitored and adjusted.
Rain Clutter Control (FTC)

The rain clutter control will reduce the
interference on the screen due to the rain and increase the chance of seeing targets
within rain showers. The effect on returning
echoes from rain on the screen is usually no more
than a transparent smear, looking a little like cotton wool, but it can be
dense enough to conceal other echoes within the shower. In a tropical downpour
however, the rain can completely block out all echoes, at times requiring the
operator to stop the vessel.
The rain clutter control works by making use of the
fact that the returning echo from rain is different from the returning echo of
a solid object. The returning echo from rain is much longer and very much less
dense than the echo from a solid object. The rain clutter circuitry works by
passing on to the receiver only the leading edge of a returning echo. This does
not affect the returning echo from a solid object like a ship, but drawn out,
weak returning echoes from the rain however, will be weakened considerably.

In practice however all returning echoes will be
affected, resulting in a reduction in strength from all returning echoes and a
reduction in picture quality. Sometimes the sea clutter control may be used to
better effect, to see through the rain. However, if you adopt this approach
remember that close-in targets will also be lost, which may defeat the purpose.
Interference
Rejection (IR)
Mutual Radar Interference is caused by other radars
in the locality operating on a similar frequency to your ship’s radar. The
interference shows up as bright spots

scattered over the screen, or as a distinctive pattern of dotted lines curving
outwards from the centre of the screen. It is more common on longer range
scales as on shorter range scales only a few of the interfering pulses will be
displayed.
If only one other radar is involved this is not too
serious, but in busy traffic areas the clutter can be dense enough to cause
confusion. An interference rejection circuit can minimise this problem. It
works by rejecting any echo which does not return from any two successive
pulses. While large targets will not be effected by
IR, some small echoes may be lost. There is no IMO symbol for IR.
Echo
enhancement
To assist the operator to spot small targets, most
modern radars have the ability to expand them. Usually named echo stretch or
expansion, its sole object is to make small targets look bigger. This can at
times be a great benefit, but it also tends to distort the picture and reduces
range and bearing discrimination. Expansion may be useful at times but should
be switched off when not required. There is no IMO symbol for echo expansion.
Heading marker and range rings
The heading marker and the range rings can obscure
small targets. So it’s a good idea to have the range rings turned off when they
are not in use and to delete the heading marker every few minutes to see if it
is masking a small target, dead ahead. The heading marker delete control is
usually self cancelling; that is the heading marker will reappear as soon as
the button is released.
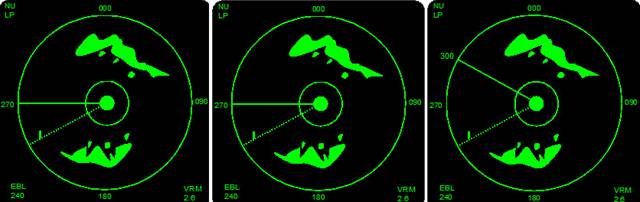
Pulse Length Control


The pulse length is normally selected automatically
with the range scale. On most sets however, in the mid ranges (6 mile to 48
mile on a 72 mile radar), it is possible to manually select the pulse length,
which will have a significant effect on radar performance. A long pulse length
increases the chance of detecting targets at long range. Selecting a short
pulse length will increase range discrimination, making it possible to
distinguish between a tug and its tow for instance.

In the PPIs shown it can be seen that when long
pulse is selected the small target almost dead ahead is visible, but the tug
and tow are merged and shown as a single contact. Also, on the left the land
mass has merged with the islands.
When short pulse is selected the small target ahead
is lost, but the tug and tow are shown as separate and the islands have
separated from the land mass.
Off-Centring
By using the off-centring control the centre of the
picture can be moved downwards or upwards and on some newer sets it can also be
moved sideways. Moving the centre of the picture downwards expands the effective
range of the radar forwards at the expense of range astern for instance on a
six mile range, off-centring would enable you to see nine miles ahead but only
three miles astern. This could be an advantage when piloting but may be a
disadvantage when using radar for collision avoidance as a faster vessel can
catch up to your ship very quickly and you may be unaware of its presence until
you see it overtaking through the wheelhouse window.
3.Tuning the radar
Turning
on, tuning in, switching off
Watchkeepers should be aware that masters may pre-tune and lock off the
controls of their radars (a function enabled by depressing the knobs) in order
to stop fiddlers. However, the following instructions apply to
most radars, though the procedure may differ on more
complex models.
First check that the scanner is free to rotate so
as not to foul rigging and that no crew members are working in the vicinity to
avoid soft tissue damage from the harmful microwave emissions.
It is particularly important with older analogue
display radars before switching on the radar to first turn the brilliance and
gain controls right down. Analogue displays produce the picture by directing a
stream of electrons onto a delicate florescent coating inside the screen.
When the set is first turned on, this beam of
electrons is directed at the very centre of the screen, over time this would
result in burning out the centre portion of the display. Turning down the
brilliance and gain first will reduce the intensity of the beam and prevent
damage to the screen. For the same reason it’s a good practice at sea, to
always have some sea clutter employed so as not to burn out the centre of the
screen.
Many rasterscan radars
will automatically tune for optimum performance. However, operators often
prefer to tune manually to ensure top locally relevant performance, so all
radars have provision for manual tuning. The best practice for an optimised
manual tuning is by an alphabetical order. After switching on then adjust the
scale
Brilliance. Next, after selecting transmit
adjust the Gain, then Heading marker, then Range and
then Tuning.
Turning
on and tuning in sequence
Turn all controls to minimum, press the power
button and when the set warms up and notifies its standby status (up to 120 seconds),
then switch to transmit

After switching power on you will then have to wait
until the set warms up, this is usually 120 seconds. With a raster scan display
you can set the brilliance to suit the conditions at this stage.

While you are waiting most sets will give a
countdown, or an indicator light will come on after the warm up period is
completed. Once warm up is completed the set will be in standby mode, the
transmitter can now be turned on.

When the set is transmitting you will get a picture
of some sort. If necessary re-adjust the brilliance. With a
analogue the brilliance/gain should have been set to zero, so you must turn up
the brilliance so the time-base trace is just visible.

Next, with an analogue display adjust the gain up
to about 70% or until background noise (speckle) can just be seen, this will
ensure that weak echoes will be seen.

With a raster scan display adjust the gain up until
background noise is just seen across the entire screen, then turn it down until
it just disappears.

The heading marker and the range rings can obscure
small targets. So it’s a good idea to have the range rings turned off so far
and to check if the heading marker is
masking a small target, dead ahead. The heading marker
on/off control is usually self cancelling and will reappear as soon as the
button is released.

You will have spent some time with your eyes in the
radar rather than out the windscreen so now a visual check for unnoticed
targets is prudent. Compare the visual with the radar at the appropriate range
scale. Re-adjust the gain if sighted targets are not displayed. Next select a
suitable range for use. This is dependant on your
manoeuvrability but at sea will usually be one of the middle ranges. For a 72 nm radar the 12 mile range would be selected and at the
same time checks ensure that other controls such as, rain clutter and
interference rejection (IR) are turned off.

Next the tune is adjusted. To do this you have to
be receiving something, even if it’s only sea clutter. Preferably choose a
distant weak target, as the effect of tuning will be more obvious. Then adjust
the tuning knob for the clearest and brightest picture. If you are at sea, with
no targets visible, adjust the set for maximum sea clutter.
Adjust the tuning control slightly then wait for a
few sweeps to see the result. Continue fine tuning for the clearest picture
with most targets displayed. Most radars have a tuning
indicator to assist. Tune for the maximum number of tuning lights but don’t
totally rely on the meter as your eye is the superior indicator. After tuning
readjust the gain for a light noise background.

Next, return to the desired range scale and adjust
the anti-clutter controls. Then check the VRM against the range rings and the
alignment of the heading marker against the ship’s head. If a performance
monitor is fitted, check that performance is satisfactory. The radar is now
ready for operation. After 10 minutes recheck the gain control and retune the
set, because as the set warms up the transmitter frequency is likely to have
changed slightly. Check gain, clutter controls and tuning again after every
hour or so of operation as the set may gradually drift out of tune.

Remember the alphabetical start up sequence - after
you have switched on, adjust the Brilliance, Gain, Heading marker, Range
and Tuning. Before shutting down the radar set turn the brilliance and gain, to the
minimum and turn off the anti-clutter controls. This will extend the life of
the display and allow the next operator to set up the radar using standard
procedure in the minimum time.
Incorrect adjustment of controls
If the radar controls are incorrectly adjusted the
performance of the radar will be adversely affected. This could result in small
and weak targets remaining undetected and larger targets being detected at a
reduced range. Good watchkeeping procedure should
ensure that the radar is carefully monitored, checked against the visual watch
whenever the opportunity arises and always tuned for optimum performance.
4. Radar presentations
Relative motion unstabilised
display
Most small vessels are equipped with a relative
motion unstabilised display. This display shows the
picture and not the vessel in motion. The ship is at the display’s centre and
the heading marker is aligned with 000° on the azimuth ring head-up.
Having your own vessel at the centre of the display
is easy for relating the real world to the radar image, as the right hand side
of the screen corresponds to the view to starboard and left hand side to port
of your vessel.
When the vessels course is altered, the heading
marker remains upward at 000°, while the whole picture rotates in the opposite
direction by the amount of the course alteration. All bearings are therefore
relative to the vessel’s fore and aft line. During the time the vessel is
altering course, the whole radar picture is rotating, making the radar useless
until the vessel settles on its new heading. This time lag is a severe
disadvantage during pilotage manoeuvres.

The ships head up (SHU) displays above show the
sequence of events as when your own vessel alters course in relative motion unstabilised displays. The left shows your own vessel on a
course 000°Rel & 270°T. The true target bearing is:
270°T + 330°Rel = 600° - 360° = 240°T target bearing.
Your own vessel then alters course by 30° to
starboard (to 300°T). The middle display shows your vessel half way through the
course change (15°).
The right shows the display after your own vessel
has settled on the new heading of 300°T. The targets true bearing is now 300°T
+ 300°Rel = 600° - 360°
= 240°T.
Relative motion course-up stabilised display
The course up (CU) displays below show use the
heading information from the vessel’s electronic compass. This could be a
magnetic fluxgate compass or a gyro compass but generally a gyro compass would
be employed for this purpose as all
courses and
bearings will then be true bearings and courses. The heading marker will appear
at the top of the screen and will indicate the vessel’s true heading. The true
bearings of targets can be read from the azimuth ring. The radar is then said
to be stabilised.
As it is still the picture that moves and not the
vessel, the display is still ship’s head-up, which means that the whole picture
will move when the vessel alters course. However, the display will not be
affected by yaw which makes the course-up stabilised display ideal for
collision avoidance purposes.

The displays above show the same sequence of events
this time with a ship’s course-up (CU) stabilised display. The vessel’s true
course is shown at the top of the display. Therefore the bearing of the target
will be a true bearing.
Note: that it is still the picture that moves.
Relative Motion North-Up Display
The navigator can also choose to operate the
stabilised display in the north-up mode (NU). In NU mode the display is
stabilised with north at the top of the screen. When the vessel alters course
only the heading marker moves. This display makes comparison with the chart
easier and allows continuous observation of targets, even while altering course
which makes this display ideal for pilotage purposes.
The displays above show the same sequence of events
on a relative motion north-up display.
Note: that only the heading marker moves.
True motion display
With the addition of information from the vessel’s
log as well as the gyro or fluxgate compass, most modern radars can be switched
to show true motion. In a true motion display the centre of the picture moves
across the screen in time with the actual movement of the vessel. The vessel is
then seen to pass the coastline rather than the coastline pass the vessel,
stationary objects like buoys will appear stationary on the display.
True motion (TM) is the preferred choice of many
operators for pilotage operations as you can watch
your vessels progress on the display in the same manner as you would with a GPS
plotter. True motion also has the advantage that echoes of vessels under way
can be distinguished at once by their trails, indicating their true courses,
while the echoes of stationary objects can be readily identified by the absence
of echo trails. To achieve this the radar must be
ground stabilised.
True motion displays can be either sea stabilised, or ground stabilised. With a sea
stabilised display, information concerning the vessel’s heading and speed
through the water are fed to the radar. In a ground
stabilised display additional information concerning the set and rate of the
tide is also applied.
Your ship’s cursor can be made to start at any
point on the screen and then moves outwards towards the edge. It will
automatically reset itself when your ship’s cursor has traversed two thirds of
the radius of the screen, or it can be reset manually.
For collision avoidance purposes however, a
relative motion display is preferred as calculating the closest point of
approach (CPA) in true motion is a more complicated process.

The displays above show again the same sequences of
events this time with a true motion display.
Note:
that moving objects display echo trails.
5. Radio propagation and radar performance
The radio wave
To best interpret radar information an
understanding of radio wave propagation and how that limits radar performance
is required. It is vital for the mariner to understand how a
radar operates, what information you can obtain from it and more
importantly how it can deceive the unskilled operator.
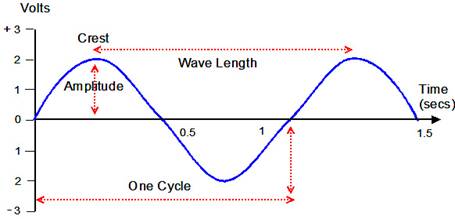
cycle One
complete oscillation
frequency The
number of cycles passing a given point per second. The unit of frequency is the
Hertz (Hz)
wavelength The
distance between successive crests
amplitude The
vertical height of the wave from crest to centreline
Radar uses electromagnetic energy in the form of
radio waves. In marine radars, the waves are not transmitted continuously but
in pulses. The pulses travel outwards in a directional beam at a constant speed
of 300 million metres per second (161,987 nautical miles). When the radar pulse
strikes a reflective surface, part of the wave bounces back from the object,
the way sound waves bounce back from an object, and produces an echo. We can
calculate the range of the target with the formula:
Range = T x S
2
where:
T = Elapsed time
S = Speed of radar wave
Marine radar types
X Band or 3 cm radar
Radar
wavelengths are expressed in centimetres, the commonest commercial marine radar
being 3 cm (actually 3.1 to 3.2 cm). This corresponds to a frequency of 9300 to
9500 megahertz (millions of cycles per second) and is called X-band radar.
A 3 cm
radar requires a smaller scanner to achieve the desired beamwidth
and definition as compared with a 10 cm radar. X-band radars are particularly
suited to coastal navigation and pilotage due to
their high picture definition and quality. On the negative side a 3 cm radar produces more side lobes than a 10 cm radar and
the radio waves are not as refracted to the same extent. Therefore they will
not achieve the same range as a 10 cm radar.
S Band or 10 cm radar
Another
common marine radar wavelength is 10 cm (actually 9.2 to 10 cm) with a
frequency of 3000 to 3246 megahertz. This is known as S-band radar. A 10 cm
radar will require a scanner up to 5 metres long to focus the beam. However,
once produced the beam will produce fewer side lobes and travel further along
the surface, resulting in a greater maximum range. Another advantage of S-band
radars because of their longer pulse length and greater power is that they will
be less affected by attenuation than X-band radars.
S-band
radars are suited to long range landfall navigation and early detection of
targets for collision avoidance, due to their superior range and the cohesive
quality of their pulses. On the negative side 10 cm radars require a larger
scanner, greater power and often a longer pulse length resulting in a loss of
definition at short ranges.
A 3 cm
radar is nearly always the preferred choice for small craft due to the greater
power and scanner size requirements of 10 cm radar.
Radar transmissions
Echo Strength

As the radar beam spreads out with increasing
range, due to the wide vertical beamwidth, power
decreases rapidly. The radar’s energy is inversely proportional to the fourth
power of the distance from the scanner.
Horizontal Beam

In the horizontal plane the radar beam consists of
a strong narrow main lobe and smaller side lobes. The width of the horizontal
beam (measured between the half power points of the main lobe) is equal to 70 x
wavelength divided by scanner width.
d
where:
q = width of horizontal beam (HBW)
l = wavelength
d = scanner width
Vertical Beam
The vertical beam width (VBW) is determined by the
width of the scanner. It must be wide enough to give good target echoes when
the vessel is rolling or pitching heavily, and is usually between 20° and 30°.
Maximum Range
& Minimum Range
The maximum range of the radar depends on various
factors including wavelength, pulse repetition frequency (PRF), power output,
HBW, receiver sensitivity and scanner height. Experience and the radar log will
tell you typical detection ranges for various types of targets. The theoretical
maximum range can be calculated by using the following formula found in
nautical tables.
Range in nautical miles = 2.21Öh + 2.21ÖH
where:
Ö = square root
h = height of the scanner in metres
H = height of the target in metres
The
minimum range of a radar depends mainly on the pulse
length, and is slightly more than half the shortest pulse length, a typical
figure would be 25 metres.
Range & bearing accuracy
The range accuracy depends mainly on the accuracy
of the timebase and the range markers. It should not
exceed 1.5% of the maximum range of the range scale in use, or 70 metres,
whichever is greater. It should be calibration at suitable opportunities.
The bearing accuracy of a radar
depends mainly on HBW, the narrower the beam, the better the bearing accuracy.
The bearing accuracy will be quoted in the manufacturer’s manual, but should
not exceed 1°.
Misalignment
of the heading marker contacts will cause bearing errors and these alignments
should be frequently checked. On most sets with the radar in ship’s head-up
presentation, the heading marker can be adjusted so that it indicates 000° on
the bearing scale by an adjusting screw in the scanner unit. This is best done
by bringing a target dead ahead visually and checking to see that the same
target is bisected by the heading marker on the display. On an unstabilised display, yaw error will result, unless the
ship’s head is noted at the instant of taking a bearing.
Range measurement
In analogue radars, target range is measured
electronically by a beam of light that is continually moving across the screen
from the centre to the edge at a speed equivalent to half that of the radar
wave. The light beam forms a line called the timebase
or trace on which the target echoes appear.
In more modern rasterscan
radars range is measured electronically. When the pulse is transmitted a very
precise clocklike timebase signal is produced in the
switch register, corresponding to the speed of the transmitted pulse. If a
returning echo is received at precisely the same time as the timebase signal is produced a switch is turned on and the
returning echo displayed. The range is measured by either fixed range rings or
a variable range marker (VRM).
Pulse length
As mentioned earlier, radar does not transmit
continually, because weak echoes and close targets would be masked by the noise
of transmission, but transmits in very short bursts called pulses. The pulse is
transmitted and then the receiver listens for a returning echo from the pulse
before another pulse is transmitted.
The beginning of the pulse is called the leading
edge and the end of the pulse is called the trailing edge. For a pulse of one
second duration the leading edge would travel 300,000,000 metres before the
trailing edge leaves the transmitter. That is 150,000,000 outbound and
150,000,000 bounces off an object to returns to the
transmitter. If there were targets closer than 150,000,000 metres (80,994 nm) the
trailing edge of the transmission would not have cleared the transmitter
preventing the weaker leading edge being received - had the target being
further away than 80,994 nm the trailing edge would have cleared the
transmitter leaving it ready to receive. So a radar
with a pulse length of one second would have a minimum range of 80,994 nm. Of
course there are no radars with a pulse length of one second and a minimum
range of 80,914.5 nm. Marine radars operate between 0.8µs and 1.2µs
Example
What
would be the minimum range of a radar with a pulse
length of one 1µs (one millionths of a second)?
Range
=
300,000,000 = 300 mtrs
1,000,000
to find
minimum range divide by 2:
Minimum range =
300 = 150 mtrs
2
What is
the minimum range of a radar with a pulse length of
0.8µs?
Minimum range = 0.8 x 150 = 120 mtrs
A long radar pulse uses more energy than a short
pulse of the same power. It will also travel further and the returning echo
will produce a more conspicuous echo on the radar screen. However a short pulse
will achieve better range discrimination and definition resulting in a clearer
radar picture.
So a long pulse is required to detect targets at
long range and a short pulse is required for definition and good range
discrimination. To overcome this contradiction most radars
are equipped with typically 3 to 5 different pulse lengths, from 0.08 to 1.2 µs
(millionths of a second). The pulse length on most radars
is a function of range. If you select a short range, a short pulse length will
be selected automatically, if you select a long range, a long pulse will be
selected automatically.
Pulse repetition frequency (PRF)
Pulse repetition frequency (PRF) is the number of
pulses transmitted per second. While minimum range is affected by the duration
of the pulse the maximum range is affected by the PRF. There must be a null
period between the transmission of each pulse to allow the weaker returning
pulse to return without colliding with and cancelling out the next outgoing
pulse. Most radars will have a different PRF
corresponding to each pulse length. A typical PRF is 500 pulses per second for
long pulse and 3000 pulses per second for short pulse.
Bearing measurement
To obtain an accurate bearing, the radar pulse is
concentrated in a narrow beam in the horizontal plane, and is rotated
continuously through 360° in synchronisation with the trace in an analogue radar. The radar assumes that if it receives an
echo, its beam must be pointing straight at the target in question. A line on
the screen called the heading marker provides a bearing reference, and target
bearings are measured by an electronic bearing line (EBL) or in older radars a
bearing cursor.
Wavelength and frequency
The wavelength (l) and frequency (f) of the radar wave are inversely proportional
to each other, and are related by the formula:
c = l x f
or:
f
= c
l
where:
c = The constant speed of
the wave
Example
With a wavelength of 3 cm at a constant speed of
300 m/µs, what is the frequency?
f
= c = 300,000,000
= 10,000,000,000 Hz = 10,000 MHz
l 0.03
Refraction
If the radar wave travelled in straight lines, the
distance to the radar horizon would only be dependent on the radar’s power
output and the height of the scanner. In other words, the distance to the radar
horizon would be the same as that of the geometrical horizon for the scanner
height. However, both light and radar waves are subject to downward bending as
they pass through the atmosphere, the amount of bending being greater for
longer wavelengths. This bending is known as refraction.

Radar horizon
Radar waves are longer than light waves, so bending
due to refraction will be greater, resulting in the radar horizon lying beyond
the visible horizon. The radar horizon under normal atmospheric conditions is
about 6% greater than the visual horizon.
Effects of weather
Weather
conditions affect radar performance, in three ways:
- non-standard atmospheric
conditions
- attenuation
- unwanted echoes
The
radar horizon assumes standard atmospheric conditions of:
- pressure = 1013 hpa decreasing at 36 hpa /
1000 feet of height
- temperature = 15°C decreasing at 2°C / 1000 feet of height
- relative humidity = 60% and constant
with height.
In the
standard atmosphere the temperature and moisture content decrease relatively
slowly with height and the radar’s range will be normal. In non-standard
atmospheric conditions the radar’s range will differ from normal.
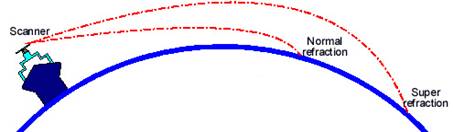
Super-refraction
Super-refraction
will occur when a warm air layer overlies a cooler sea surface (i.e.
temperature inversion). The radar beam is refracted more than normal causing
considerably increased target detection ranges, typically up to 25%.
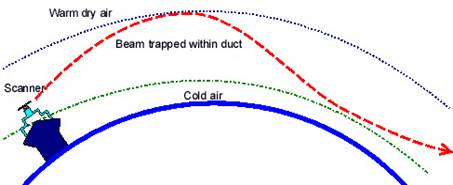
Ducting
An
extreme form of super-refraction is known as ducting, when the radar beam is
conducted for long periods within a duct formed by air layers. When this
occurs, unusually long detection ranges of targets may be experienced. It is
during periods of ducting that second trace echoes may appear.
Sub-refraction
Sub-refraction occurs when a cold layer of air overlies a warmer sea surface. The radar beam is refracted at less than normal, causing reduced target detection range.

Attenuation
Attenuation
occurs when part of the radar energy is absorbed by water vapour in the
atmosphere. It is greatest in heavy rain and can cause severe reduction in
detection ranges but may also occur in hail, snow, sleet and, to a lesser
extent, in fog. A 10 cm radar because of its greater
power will be less affected by attenuation than a 3 cm radar.
Rain clutter
Echoes
from precipitation have much the same effect as sea clutter. It looks like
cotton wool and the strength of the echo depends on the amount of
precipitation. Heavy rain will completely mask out target echo, especially on
older style colour radars where everything turns red.
Other causes of attenuation
Clouds
may cause echoes similar to rain clutter if they are low and have precipitation
within them. Other conditions such as sand and dust storms, smoke and haze do
not usually cause echoes.
Target acquisition
The
ability of a radar to detect a target depends on two
factors, the peak power of the transmitted pulse and the reflective properties
of the target.
The
maximum range of a radar set will depend on the peak power of the radar,
scanner height, weather conditions and the reflective properties of the target.
Peak power for a x-band radar varies from about 1.5 kW
for a 12 nm radar to 25 kW for a 120 nm radar. A minimum of 3 kW is required to
pierce fog, 4 kW will be more effective. Considerably greater power is required
to transmit in the S-band.
The
reflective properties of the target include its:
- size
- material
- aspect
- surface texture
Target size

All
other things being equal, a large target will reflect more of microwave energy
than a small one. So it will produce a stronger echo, and show up on the screen
as a brighter image at a longer range.
Target material
Targets
of hard, dense material with good conducting properties give the strongest
echoes. Rock and concrete are good reflectors but the best reflector is metal.
Wood is almost invisible to radar, because wood tends to absorb the microwaves
instead of reflecting them. Sand and mud will also produce a very weak echo.
GRP and plastics are poor reflectors because the microwaves will go straight
through them.
Target aspect

A target
at 90°
aspect to the radar beam will reflect most of the microwaves back to the
scanner and produce the strongest echo.

Targets
at oblique angles will reflect most of the energy in other directions and
return a weak echo.
If the
target’s surface is uneven at least some of the microwave energy will be
reflected back.
Target shape

Generally
speaking flat surfaces are better radar reflectors than curved or pointed ones.
So the best reflector will be a perpendicular plane surface, like a ship’s side.

A sphere is a poor reflector as it will only return an echo from that
part which is at right angles to the beam, which is a very small reflecting
point in the centre. The rest of the microwaves will be reflected outwards and
lost.

A
cylinder is a moderate radar reflector. Like a sphere it will only reflect from
the part which is end on to the radar beam.
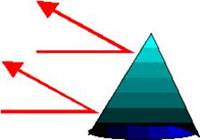
A cone
is a very poor reflector. It reflects all the energy upward and away.
Surface texture
A
perfect, mirror like smooth surface would produce a very weak echo unless it
was perfectly aligned at right angles to the radar pulse. In practice this
rarely occurs, almost everything includes surface irregularities, which scatter
the pulse, so that some of it will return to the scanner. Therefore, a target
with a rough surface scatters energy evenly and gives a fair echo at any aspect.
Practical targets
The echo
strength and detection range of practical targets such as coastlines, beacons
and other vessels depends on a combination of all previously mentioned
characteristics, the most important factor being aspect. A large tanker, at an
acute angle to you may not give as a strong return as a small fishing vessel
beam on to the radar pulse. A cylindrical object like a lighthouse (unless
fitted with a radar reflector), may give a very poor echo, despite the fact
that it can easily be seen with the naked eye. Mountains and coastlines will
show up because of their shape rather than their height. You can never be sure
which part of the landmass is reflecting the best and, therefore, you cannot be
sure of exactly what you are seeing on the display. Experience will tell what
detection range to expect for each type of target. The weakest echoes, or those
unseen may be the most dangerous.
Note: that
from a ship underway, a target presentation on the screen can alter as the
aspect changes.
Navigational aids
Radar reflectors
Radar
reflectors are fitted to vessels or navigational buoys or other charted
features to improve their reflective properties so as to make them visible to
searching radar. There are two types of radar reflectors:
·
passive
·
active
Passive radar reflectors
Vessels
or other objects constructed of wood or GRP are almost invisible to radar. If these craft are to show up on another
vessel’s radar they must be equipped with a radar reflector. All radar
reflectors work on the principle of the corner reflector,
when
two flat plane plates form a corner, the corner has the ability to reflect
directly back to wherever the signal is coming from.

Most
radar reflectors are improvements on this principle, the basis of which is that
three plates at right angles to each other will give the reflector the ability
to reflect a strong signal over a wide angle, both horizontally and vertically.
In order to cover all angles, radar reflectors are usually arranged into
clusters, the most common type being the octahedral (8 corner reflectors).
Octahedral
clusters work well if they are mounted correctly. It should never be attached
to a halyard by any of its points. This destroys a large part of the reflecting
capability. It is best rigidly mounted with one of its open faces uppermost, so
that the device could retain water in the cup. This is known as the rain catch
position.

Shown
above is an octahedral radar reflector. The radar reflector would perform
better if it were rigidly mounted in the ‘rain catch’ position and below the
newer encapsulated type of radar reflector can be hauled up the mast on a
halyard.

Active radar reflectors
There
are two types of active radar reflectors or radar transponders which are used
to assist the navigator to identify charted objects:
- racons
- ramarks
Racons
A small
pulse transmitter is mounted on the beacon, which when triggered by the radar
pulse of a vessel radiates an identifying signal in all directions. The ship’s
scanner can only receive this signal when the scanner is pointed in the
direction of the beacon. So the pulse will be displayed on the screen at the
correct bearing, but because of the slight delay in transmission, the beginning
of the pulse will be displayed at a greater range than the true echo.
Due to
the system of scanning used, the mark will be displayed on the screen only
intermittently or every few sweeps. The true echo of the beacon will appear on
the screen in front of the identification signal, when it is in range.

The above
figure shows a Racon (morse code O). Racons are
particularly useful for showing up objects which otherwise may be difficult to
identify, for instance an important navigation mark in a busy traffic area, an
isolated point on a featureless coastline or the entrance to an important
navigational channel.
Ramarks

The
above figure shows a ramark (radar marker).
Ramarks transmit pulses continuously or to special
time schedules, rather than on receipt of a vessel’s radar pulse. They appear
on the display as a bright radial line from the centre of the display to the
edge and are identified by breaking up the radial line into a series of dots or
dashes. Their major disadvantage is that they may mask other important echoes
on the screen. Ramarks are now rare,
there are none in Australian waters.
Search and rescue
transponders (SART’s)

A SART
is a portable battery powered radar transponder which operates on “x-band or 3
cm radar”. In an emergency situation when the SART detects the incoming radar
pulse from a searching aircraft or ship it responds by transmitting a
distinctive signal which shows up on the radar screen of the searching vessel
as a series of 12 blips extending approximately 8 nautical miles outward from
the SART’s position along its line of bearing. Figure 35.
When a
SART is not being interrogated by searching radar, the SART’s receiver is
rapidly sweeping the radar band, searching for radar signals. As all marine
radars do not operate on exactly the same frequency within the “x-band”, there may
be a small delay in SART response as the SART locks on to the searching radar
signal. When the SART receiver has locked on to the searching radar there will
be a delay as the SART switches from receive to transmit mode.
These
delays will result in a slight range error, and therefore the first blip of the
SART response may be some distance outside the position corresponding to the
actual location of the SART. At medium ranges of about 6 nm the range delay may
be between 0.6 nm to 150 metres. As the SART is approached by the searching
radar the range delay should be no more than 150 metres.
When
searching for a SART the IMO recommends that a range scale of 6 or 12 miles
(with short pulse selected) be used because the spacing between the SART
responses is about 0.6 nm or 1125 metres and it is necessary to see a number of
responses to distinguish the SART from other responses.
A search and rescue transponder (SART) is shown below.

Anti-collision radar
transponders
Anti-collision
radar transponders will produce a line of five blips over 1 nm on an
interrogating vessel’s radar screen. A vessel carrying the transponder will
also be alerted to the other vessels presence by a visual or audible warning
signal when it is being interrogated by the other vessel’s radar signal.
Performance monitoring
A
performance monitor informs the radar operator whether the radar is operating
at full efficiency or not. It should be used when the set is first turned on
and at frequent intervals thereafter when no targets are present on the screen.
A lack of targets may be due to a lack of targets but may also be due to poor
radar performance.
There
are two types of performance monitors, external and built-in. Both types both
utilise a metal echo box mounted behind the scanner and resonant to the radar’s
frequency to capture some of the radar’s transmitted energy.
The
external type makes a long plume like line on the screen in the direction of
the echo box. The length of the plume depends upon the following:
- transmitted power
- receiver sensitivity
- correct tuning
The
monitor gives an indication of the efficiency of the set. The length of the
plume is measured when the set is installed and known to be performing well. If
at any time the plume is shorter, one or more of the above factors may have
deteriorated and allowance for this made, or the fault rectified. The built-in
type is used in the same manner, but produces a circular pattern the radius of
which is measured.
The
figure on the left shows the plume from an external performance monitor. The
length of which according to the radars logbook should be 1 nm. Some
readjustment of the radar is required.

The radar
logbook
The
radar logbook serves two functions one technical and the other operational. On
the technical side, information recorded in the logbook would include:
maintenance and repairs carried out, spares on board and their part numbers,
technical and performance details and information concerning arcs of shadow and
blind sectors. On the operational side, information recorded in the logbook
would include: details of detection ranges for various types of targets and
information concerning detection ranges of conspicuous objects.
Performance standards
Recommendations on performance
standards for radar equipment can be found in IMO, Class and AMSA guides for radar equipment, referred to as
type tested.
Installation, maintenance and safety precautions
Today, a technician is no longer required to
install a radar. It’s just a matter of securing the
radar and scanner with a few bolts, plugging the cables together, earthing the set and connecting up to the power supply. The
cable connecting the display unit to the scanner can be provided in custom
lengths to fit the specific installation. The cable should never be cut.
When installing a radar, the scanner unit should be
positioned as high as practical to give the best possible range and clear of
obstructions to avoid shadow sectors. It should also not be so close to other
electromagnetic equipment as to cause interference and should be away from
excessive heat or vibration, but accessible for maintenance. Once installed the
range and heading marker accuracy should be checked by competent personnel and
the limits of any shadow sectors established and recorded in the radar logbook
and displayed on a card near the radar.
The display unit should be positioned so that it is
in easy reach of the navigator and facing forward to facilitate lookout. It
should be at a convenient level and position for observing and servicing, away
from the magnetic compass, other electromagnetic equipment, and exposure to
weather. If the radar is flush mounted ensure that there is good ventilation to
the rear of the set.
Maintenance and
troubleshooting
Maintenance of modern radars is a relatively simple
affair. Firstly, read and follow the instructions in the manufacturer’s
operator’s guide. Keep a radar log, and record in it maintenance, service,
faults and repairs, as these could be invaluable to assist the radar technician
to diagnose a problem.
Radars are generally very reliable and need only to
be protected from water, heat and physical damage. A regular maintenance
program would consist of periodically checking mounting bolts and brackets,
keeping wiring connections clean, tight and external wiring connections smeared
with a thin coating of petroleum jelly. The set itself should be keep clean and
free of salt spray.
Troubleshooting would first involve checking that
the unit is receiving power and that the correct start-up procedure has been followed.
If the power supply is OK, all connections are clean and tight, the main
circuit breaker or fuse is OK, the internal fuses are all right and the scanner
is free to rotate and the set still does not work, then it is probably time to
call a technician.
Safety precautions
Personnel should avoid microwave radiation hazard
by keeping clear of an operating scanner. If working aloft on the scanner unit
or other equipment near the scanner unit. Ensure that:
- the radar unit is turned off, the power disconnected and a sign
placed on the display informing others that you are working aloft
- clip on a safety harness
- tie on a tool bag that won’t spill if inverted
- don’t raise or lower power tools by their cord
- if
at all possible have someone assist you
The high voltage circuits inside the display unit
can cause electrocution and must not be touched except by qualified personnel
with the radar switched off. The display unit has potentially lethal voltages
inside the unit even after it has been turned off.
Note: A good rule to remember is if the back has to
be removed, leave it to the experts.
Where to site the scanner
Siting of the
scanner unit requires careful consideration so that a compromise can be reached
between the effect of height on range performance and sea clutter and the need
to minimise shadow sectors and false echoes. The higher the scanner is placed
the more pronounced the sea clutter return.
The scanner should be mounted on a structure which
will not twist and cause bearing errors. To ensure that the heading marker
indicates the true fore and aft line
of the
vessel the scanner should be sited as near as possible to the centre line of
the vessel.
Where to site the display
The following should be considered when siting the display unit:
·
under marine regulations, installation
instructions include the minimum safe distance that the display should be
mounted from the magnetic compass..
- light
issuing from the display unit should not interfere with visual lookout
when the bridge is in darkness.
- it
should be possible for two observers to view the display simultaneously
with any fitted display visor removed.
- the
display should be mounted so that an observer faces forward when viewing
it so as a visual lookout ahead can be maintained.
- the
display should be mounted sufficiently rigidly so as not be adversely
affected by vibration and away from excessive heat and fumes.
- when compass adjustments are being
made, the radar set should be in operation.
6. False radar information
False echoes
Radar can deceive us by displaying targets that may
not exist at all. These are called false echoes.
Side echoes
Squeezing a naturally an
multi-directional radio wave into a directional radar wave is never fully
achieved. Not all of the radar wave can be focused by the radar aerial into the
main lobe. Some escapes into what are known as side lobes. Side echoes are
caused by reflections from the side lobes of the radar beam. They are likely to
appear when a target is a good radar reflector and in range of the weaker side lobes.

The true target will always be the stronger echo in
the centre of the pattern. Side echoes can be removed by reducing the gain, or
by using the sea clutter control.
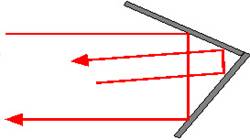
Indirect echoes

Indirect echoes are caused when some of the
outgoing radar energy is reflected from an object close to the scanner such as
a funnel or mast. The echo may return by the same path or directly to the
scanner. The false echo will appear (usually intermittently) on the display at
the correct range because the additional distance between the scanner and the
reflecting object will be negligible, but on the bearing of the obstruction.
The true target will also appear on the display at the correct range and
bearing.
Indirect echoes usually occur in shadow sectors
however, they can appear on bearings where there are no shadow sectors.
Indirect echoes are usually associated with funnels and other large objects
close to the scanner.
Although the bearing of the real target may change,
the bearing of the deflected target will remain constant and may if the range
is decreasing, appear to be on a collision course. To determine if the target
is an indirect echo or not, alter course about 10°, if the relative bearing of
the echo remains constant, then the echo is a false one. Alternatively the gain
can be reduced, or if the echo appears in a known blind sector it can be
ignored.
The other form of reflected or indirect echoes uses
strong targets such as buildings, bridges or large ships usually when
navigating in rivers or harbours. While some of the radar beam is returned to
the scanner, much of it is deflected in other directions but at close range it
can produce a beam which will be reflected from the secondary target. This will
show on the display on the same bearing as the strong target but at an
increased range. It will also show up in its correct position so it should not
be too much of a problem.
Multiple echoes
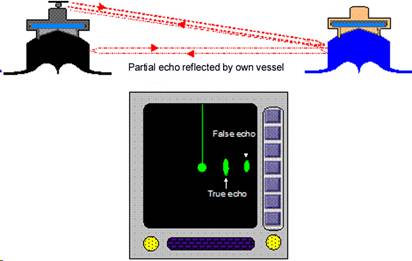
Multiple echoes are caused when a strong echo
arrives back at your vessel and bounces off it, effectively retransmitting the
signal. For this to occur the other target must be large and close, and both
the target, which may be a land target such as a bridge or headland or another
vessel, and your ship must be good radar reflectors. The false echoes (which may
be any number) will appear at multiples of the true range on the same bearing.
Multiple echoes can be removed by reducing the gain.
Interference

Radar transmissions from another vessel in the
locality on a similar frequency to your vessel’s radar can cause interference
similar to the figure above. In most radars this
interference can be eliminated by switching on the IR control.
Shadow and blind sectors
Obstructions such as funnels, masts, or trawl gear
in the path of the scanner can cause shadow or blind sectors on the display, in
which targets may be lost or only detected at reduced range or not detected at
all. As the radar wave will bend to some extent bend around obstructions by
diffraction, some targets in shadow sectors will be displayed at times, while
targets in blind sectors will not be detected at all.
The radar aerial should always be placed to
minimise shadow and blind sectors.

A good method to check for blind or shadow sectors
is to find a section of slightly choppy water and turn off the sea clutter
control. If no blind or shadow sectors are present the display will fill over
an arc of 360° with a mass of small contacts, caused by the echoes returned
from the waves. Any dark streaks radiating outwards from the centre represent
blind or shadow sectors.
If blind sectors or shadow sectors are present
their limits must be determined and recorded in the vessel’s radar log. Sea
clutter is one way to determine these limits, or a sextant could be used. The
best method however, is to observe a small target vessel at the edge of a short
range, as your vessel’s course is altered. Note: the bearing when the target
disappears and then reappears.
Second trace echoes
Second trace echoes will appear at times during
periods of severe super-refraction or ducting. Targets at very long range will
appear at a false range on the correct bearing, on the second sweep of the timebase. In other words, an echo may return from a distant
target after a second pulse has been transmitted and the receiver is open.
The higher the PRF, the more likely that second
trace echoes will occur as more pulses are transmitted and the corresponding
silence period is reduced. Second trace returns can usually be made to
disappear by changing the range scale in use.
Other causes of false echoes
When navigating in rivers and harbours overhead
power cables at close quarters can return an echo from the direction where the
cable is at right angles to the radar beam, the effect on the display is a
small echo which is closing on a collision course. The echo disappears when the
vessel is close to the overhead cable as the radar beam is no longer in contact
with the target.
Beamwidth distortion
Beamwidth distortion is directly related to the radar’s beamwidth
which is largely determined by the scanner’s length. A small 60 cm scanner will
have a beamwidth of about 7° while an
2 metre scanner will produce a beamwidth of about
1.2°
A target echo will be painted on the display the
whole time the radar beam takes to sweep the target. This will have the effect
of enlarging all targets, extending each side by an angle equal to half the beamwidth of the radar. Therefore radar with a beamwidth of 2° will show a small target such as a buoy to
be as an arc 2° wide. An island 10° wide will appear to be 12° wide and a
headland will appear to extend 1° further to sea than it really does.
Shown below the small buoy may only be ½° wide but
as the radar beam rotates it will paint the buoy from the moment the leading
edge of the beam first touches the buoy and during the whole time it sweeps
across the buoy until the trailing edge is clear of the buoy. Therefore on the
radar display the buoy will appear to be 2° wide.

The advantage of larger beamwidths
is that smaller weaker targets will be painted larger on the screen,
therefore they will have a better chance of being detected from a small vessel
as it moves around in a seaway. The down side is less bearing resolution and
poor bearing discrimination.

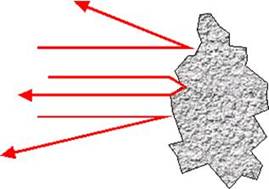
Beamwidth is very important when you are looking for a narrow passage between
islands, a narrow harbour entrance or a river entrance. Because of beamwidth distortion, a radar with a large beamwidth will not be able to see the gap until very close.
Shown above, the yacht with narrow beamwidth radar will be able to see the entrance to the
harbour on the radar display as the beam can fit entirely between the
headlands. However, to the yacht with the wide beam width radar the entrance
will remain hidden and the coast appears continuous until the yacht is much
closer.
The effect of beamwidth
distortion can be improved somewhat by reducing the gain but,
remember to turn it up again afterwards.
The range at which it would be possible for a
narrow gap to be visible on radar can be found by the formula:
Range = distance
Sin BW
where:
distance = size
of the gap
BW = beamwidth
Example
You are approaching a harbour from seaward, the
entrance of which is 0.07 nm wide, your radar has a beamwidth of 6°. At what range would you expect to see the
entrance on radar?
Range = distance = 0.07 =
0.67 nm
Sin BW 0.104528
Range and bearing discrimination
Range
discrimination
Range discrimination is significant, as it can have
an effect on the useful operating range of the radar. A long pulse uses greater
power and will detect a target at a longer range. However, a long pulse has a
down side too. Shown below a radar transmitting on long pulse may have a pulse
length of 300 metres, after it travels outwards for a distance it comes upon
two vessels 150 metres apart. Part of the leading edge of the pulse will be
reflected off the nearer ship while part will carry on to be reflected off the
second ship. Before the trailing edge of the pulse has reached the first ship,
the leading edge will be already on its way back, so that the echoes from the
two ships will merge. Instead of seeing the two ships separately on the display
they will appear as a single target.
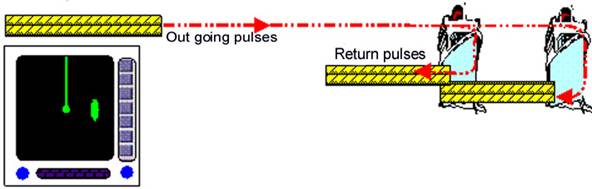
If the pulse length is more than twice the distance
between two targets, the echoes will merge.
A shorter pulse length, of say 100 metres, will
keep the echoes separate.

So a short pulse is required for good range
discrimination, and a long pulse length is required to detect weak targets at long
range.
To overcome this contradiction most radars are capable of operating at different pulse lengths
in the mid ranges. For example; you may be having difficulty distinguishing a isolated rock just off the coast from the coastline itself
(as the two objects have merged) on long pulse at a range of 24 miles. By
switching to short pulse the rock may now appear on the display as a separate
object.
Bearing discrimination
Bearing
discrimination is similar to range discrimination in that it governs the radar’s
ability to discriminate between two close targets, but this time to distinguish
between two targets close together at the same range. The radar beam can be
likened to a rotating pie slice, a small target will
be painted on the screen the whole time it takes the beam to pass over it. So
that if two targets close together can both be covered by the beam at the same
time, they will appear on the display as one target. Bearing
discrimination depends on HBW, the narrower the beam the better the bearing
discrimination.

A wide HBW
radar will receive echoes from both targets at once as both are within the
beam. They will appear on the screen as one target.

A narrower HBW radar will pass between the targets and therefore the echoes will
appear separately.
HBW is dependent on the scanner size, a small 60 cm
wide scanner will produce a beamwidth of about 7°,
while a 1800 cm foot open array scanner will produce a
beamwidth of 2°. Bearing
discrimination can be improved somewhat by reducing gain.
7. Navigating with radar
Bearings
Bearing measurement
The crucial factor in radar navigation is to
correctly identify radar conspicuous features that are recognisable on the
chart as well as on the radar screen. Towers, monuments, buildings and other
prominent features that are favourites with compass navigation will not be
visible on radar. However, objects such as headlands, islands, buoys and
beacons will, with the added advantage that they will be equally useable by day
or night.
Your ship is always at the centre of the display
(except in a true motion display) and bearings are read off from the graduation
scale around the circumference of the display.
With a North-up
or Course-up stabilised
display, where the radar is interfaced with a gyro compass the heading marker
will always point to the true course being steered. Therefore, all bearings of
targets read from the graduation scale around the circumference of the display
will be True Bearings.
In a Ship’s
Head-up display where the heading marker always points straight up to
the 000° on the graduation scale. All bearings will be Relative Bearings, that is, relative to the ship’s head or the
fore and aft line of the vessel.
Relative bearings can be represented by two
methods:
·
Red 0° to 180° or Green 0° to 180° depending whether they are to Port or
Starboard of the heading marker. Echoes to Port would be read as Red 0° to 180°
and echoes to Starboard would be read as Green 0° to 180°.
·
Circular configuration 000° to 360°. Measured from ship’s head (000°) in
a clockwise direction. An echo bearing 30° to Starboard would be read as 030°
Rel. and an echo 30° to Port would be read as 330° Rel.
Note: to avoid confusion all bearings are
identified as follows. Colours always proceed the
degrees:
G90° =
Green 90°
R90° =
Red 90°
For relative bearings Rel
will follow the degrees and all relative bearings will be in three figure
configuration:
090°Relative
= 090° Rel.

In the
figure above:
Target A
would be called; R40° or 320° Rel.
Target B would be called; G38° or 038° Rel.
What
would targets C and D be called?
Note : all radars
that have EBL’s use the circular configuration 000° to 360° relative method.
Before relative bearing can be used for radar
navigation or collision avoidance the vessel’s true
course must be known. The true course being steered is found by applying the
sum of deviation and variation (compass error) to the compass course being
steered.
Next the relative bearing of the target must be
converted to a true bearing. This is done by adding the relative bearing to the
vessel's true course. If this value exceeds 360° which means that you have
passed through north, then 360° must be subtracted from the answer.
When using Red or Green relative bearings Green
bearings will be added to the true course and Red bearings will be subtracted.
So:
True course + Rel. bearing =
True bearing
True course + Green bearing = True bearing
True course - Red bearing =
True bearing
Example
Your ship steering 035° Compass - Variation 7° East
- Deviation 4° West.
Target bearing 030° Rel. Find the true
bearing of the target?
Your
ship 035° compass
Deviation 4° West Dev. 4° West
Magnetic 031° Var. 7° East
Variation 7° East CE. 3° East
True course 038°T
True bearing of target.
Ship’s
head true + Relative bearing = True bearing
038°
+ 030° = 068°
True bearing of target = 068°T
Using the electronic bearing marker (EBL)
The EBL is a straight line from the centre of the
display to the edge of the display which is used to measure bearings of objects
from your ship, in much the same way as a compass would. In a stabilised
display bearings taken with the EBL will be true bearings and with an unstabilised display the bearings will be relative to the ship’s fore and aft line.
To take the bearing of an object simply adjust the
EBL until it cuts through the centre of the object and read off the bearing
from the EBL readout on the display.
Modern radars incorporate an improvement on the EBL
by using a electronic cursor. The cursor is usually a
cross which can be moved around the screen by using a trackball or other
pointing device. Simply place the cursor over the chosen object and read out
the range and bearing of the object from the cursor information displayed on
the screen.
Using a bearing
cursor
Older analogue radars generally do not have an EBL
instead bearings are measured by a bearing cursor. This is a line inscribed on
a clear plastic screen, laid over the top of the radar screen. This line can be
moved around mechanically to obtain a bearing. The use of a mechanical cursor
may produce the following errors:
·
If the centre spot of the radar is not directly under the centre mark of
the bearing cursor, the bearings obtained will be inaccurate. This is called
centring error.
- The
operator must view the radar in such a way as to always view the bearing
cursor passing through the centre spot. Because the screen of the bearing
cursor is not hard up against the radar screen, if you step back a little
for example, the cursor line will appear to move off the centre, causing an
error in bearing. This is called parallax error.

The top CU display above shows a target measured by
the cursor as being on a bearing of
300° at a range of 4.2 miles. As the radar is a stabilised course up display the bearing will a true bearing.
The bottom display above shows a target on a
bearing of 240° as measured by the EBL.
When measuring a bearing with the EBL, it should cut the target’s centre.
With an unstabilised SHU display
any bearing taken will be a relative to the vessel’s fore and aft line and not
to the true compass. So to find the true bearing, the relative bearing must be
added to the ship’s true heading.

Shown above, the vessel’s heading is 345°T. The
target as measured by the EBL is on a relative bearing of 240°. To find the targets
true bearing the targets relative bearing is added to the vessel’s heading.
To find
the true bearing:
Ship’s heading 345°T
Relative bearing + 240° Rel
= 585°
- 360°
True bearing 225°T
Yaw Error
With unstabilised
displays the greatest source of error is yaw error. As a vessel moves in
a seaway the vessel’s head will be continually drifting a few degrees either
side of the intended course before the helmsman or the autopilot can correct
the movement. So it is paramount that the exact heading of the boat is noted at
the moment the radar bearing is taken. A 3° yaw at the wrong moment will
produce a 3° error in the radar bearing.
This problem can be overcome by the helmsman noting
the compass course at the instant the navigator takes the radar bearing. But
this can only be managed if you have the luxury of a helmsman, a rarity. If you
have two EBL’s it’s possible to line one of EBL’s up with an object nearly dead
ahead, while using the second EBL to take the bearings. If the vessel yaws the
navigator will see this immediately and adjust the radar bearing accordingly.
Beamwidth Error
A second source of error is beamwidth
error. The radar assumes that the scanner must be pointing straight at the
target in order to receive an echo, it will start to “paint” a target on the
screen as soon as the leading edge of its beam first touches the target, and go
on painting until the trailing edge of the beam has passed clear of it. So a radar with a beamwidth of 5°
will show a small target such as a buoy as though it were 5° across, while a
radar with a beamwidth of 2° would show it as 2°
across. So if you are taking a radar bearing of a small contact, the EBL should
cut right through the centre of the target.
The radar will enlarge larger targets like headlands;
the edges of the headland will cause an echo to paint while they are
illuminated by any portion of the beam. When the leading edge of the beam is
touching the headland, the edge of the echo on the display will appear on the
bearing of the centre of the beam at that instant. The error will, therefore be
half the beamwidth in the direction of the land.
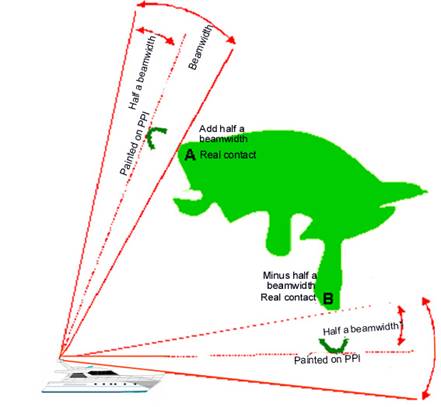
Example
Above, the vessel’s radar has a beamwidth
of 6° and the vessel’s course is 090°T. The EBL shows a true bearing of
headland “A” to be 015°T and headland “B” to be 080°. Find the true bearing of
both headlands?
The beamwidth of this
radar is 6° the contact will be extended a distance equivalent to half the beamwidth to seaward, therefore a correction of 3° towards
the land will need to be applied.
Headland A 015° (correction of ½ beamwidth towards the land) + 3° = 018°
Headland B 080° (correction of ½ beamwidth
towards the land) - 3° = 077°
With a unstabilised
display, yaw error and beamwidth error combine to
make radar bearings at best unreliable and should only be used with extreme
caution. A stabilised display will eliminate yaw error, so you only have beamwidth to worry about. Bearing in mind the effects of
adjusting gain, tuning, sea and rain clutter controls and echo expansion, radar
bearings taken with allowance for beamwidth will
produce reasonably satisfactory results.
Ranges
Measuring radar ranges
Radar is inherently better at measuring range than
it is at measuring bearings: after all, measuring ranges is what it was
specifically designed for. Also, as the heading of
the vessel
is irrelevant when taking a range, the biggest source of error, yaw error, is
eliminated. Typically, radar range accuracy is better than 1%, of the range
scale in use.
Using the variable range marker (VRM)
All radars are equipped with fixed range rings and
the ranges of targets can be estimated by using the fixed range rings. However,
most navigators prefer to switch off the fixed range rings, (because they tend
to clutter the screen), and use the variable range marker, (VRM).
The VRM is an adjustable range ring whose distance
from the centre of the screen can be varied by the operator. The radius of the
VRM is indicated on the VRM display on the screen. Mmany
radars now offer a cursor controlled VRM which will measure both bearing and
range at the same time.
The accuracy of the VRM can be checked by placing
the variable ring exactly over several of the fixed rings in turn, and noting
any discrepancy in the readings indicated. Such discrepancies can be taken as VRM
error, and can differ at different distances from the centre.
Whether you use a traditional controls or a
trackball, the method of use is the same. The range of a target is measured by
moving the VRM strobe or cursor until it just touches but does not cut the
closest edge of the target. To obtain the best possible accuracy always use the
shortest range scale available. Any combination a radar bearings and radar
ranges (and other means) may be used to fix your position.
Floating EBL and VRM
Many modern radar sets are equipped with floating
EBL’s and VRM’s. Used in conjunction with the cursor they can measure the
bearing and range from any two points on the display. This is a very useful
feature when using radar for blind pilotage as the
floating curser with practise can substitute for drawing chinagraph
lines on the face of the display.
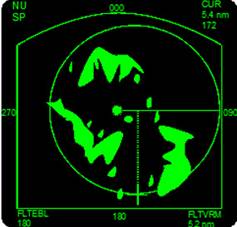
In the figure on the left the vessel is on a course
of 090°T. The position of the cursor is given from the centre of the display
as, on a bearing of 172° at a range of 5.4 nm.
The floating EBL and VRM origins have set for the
vessel’s turn point just ahead of the island on the vessel’s starboard side.
For the next leg of the vessel’s passage the course will be 180° and the
distance 5.2 nm as measured by the floating curser.
Distance to the
radar horizon
As mentioned earlier, radar, due to refraction
radar can see about 6% further than we can see visually.
It is possible, to work out just how far away, you
could expect to detect a target using a simple mathematical formula. The
formula assumes the following:
- standard atmospheric conditions
- radar pulses are sufficiently powerful
- target will return detectable echoes
- weather
conditions (e.g. rain) will not attenuate signal
Range in nautical miles = 2.21Öh + 2.21ÖH
where:
Ö = square root
h = height of the scanner in metres
H = height of the target in metres
This distance + This
distance

Example
What would be the theoretical detection range of an
object 16 metres high, from a ship with an aerial height of 4 metres?
Range in nautical miles = 2.21Öh + 2.21ÖH
= 2.21 x
4 + 2.21
x 2
= 8.84 + 4.42
= 13.3 nautical miles
Shadow sectors
Radar works very much like a flash camera in that
it provides its own light (in the form of radio waves) to take a snapshot
image. Like a camera and lens the radar snapshot will only see what is reflected
back towards the radar antenna. So anything that is behind the object that is
the reflector, or in other words, in it’s
shadow, will be invisible to the radar.

On the radar display on the left both the vessel
and the bay in which it is anchored will not be visible on the radar screen.
Both are in the shadow area cast by the island’s
headland
A good example of this is a headland, the radar
cannot see through the headland just as you can’t, so anything behind the
headland will be hidden in the radar’s shadow area. On the radar display above
both the vessel and the bay in which it is anchored will not be visible both
are in the shadow area cast by the islands headland.

The display shown above represents an island with a
smaller island in the bay and a monument on the beach. The solid lines
originating from the sailing vessel represent the radar beam and the dotted
lines indicate the extent of the shadow area cast behind the smaller island. In
the radar view the low lying beaches are not visible, but the monument is,
however it appears to be a small island or a vessel at anchor.
The small island on the right hand side has merged
with the peninsula due to beam width distortion. The anchored vessel is not
visible at all as it lies in the shadow area of the cruise liner. Only the tops
of the mountains behind the beach appear in the shadow area.
Position fixing
Radar navigation is similar to traditional
navigation in that you have to identify landmarks, measure their position
relative to your own and use those measurements to establish a position on the
chart. Radar fixing is often quicker than taking bearings with a magnetic
compass and is a more professional technique than simply transferring a
latitude and longitude from the GPS.
The accuracy of the fix depends on many factors,
including the ability of the operator, environmental factors, and the equipment
used. Accuracy will improve as the operating range decreases, so the closer you
are to the targets the more accurate the fixing, when you need it the most.
Fixing by radar
bearings
The crucial factor in radar navigation is to
correctly identify radar conspicuous features that are recognisable on the
chart as well as on the radar screen. Towers, monuments, buildings and other
prominent features that are favourites with compass navigation will not be
visible on radar. However, objects such as headlands, islands, buoys and
beacons will, with the added advantage that they will be equally useable by day
or night.
Fixing by radar ranges
Radar is inherently better at measuring range than
it is at measuring bearings: after all, measuring ranges is what it was
specifically designed for. So the heading of the vessel is irrelevant when
taking a range, the biggest source of error, yaw error, is eliminated.
Typically, radar range accuracy is better than 1%, of the range scale in use.
The usual method of obtaining a fix on the chart
from radar ranges is to use a pair of compasses and draw “position circles” of
at least three, widely-spaced identified conspicuous objects. Choose objects
that are close to the boat, since this will improve accuracy. Then measure the
ranges with the VRM. Note the ranges, then take a pair of compasses and mark
each range on the chart, with the metal compass point on the contact in each
case. Short arcs near your DR position are sufficient,
label the arcs with an arrowhead at each end. The point where these circular
position lines cross marks your position.

Long range position finding
Experience and skill are the prerequisites required
when making a landfall by radar after an ocean passage. At long range when the
coastline is below the radar horizon, the identification of inland
topographical features with echoes on the display is a matter of some
difficulty and requires considerable pre-planning.
The range at which land features will appear on the
display will depend upon many factors discussed in earlier sections, such as
height of the feature and of the scanner, the weather conditions and the
direction from which the land is viewed. Some preparation is therefore required
when intending to make a landfall with the aid of radar.
The navigator should have a thorough knowledge of
the capabilities and limitations of his radar. Meteorological conditions will
need to be taken into account when calculating the radar range at which various
land features could be expected to appear on the display. The preparation
should begin by first studying the character of the coast within a reasonable
distance either side of your estimated position and highlighting features
likely to return the first echoes. Without previous local experience a position
obtained from any less than three positively identified echoes should be
treated with scepticism. Remember that the strongest echo is not necessarily
the highest mountain, nor need the first echo seen necessarily be the highest
object above the radar horizon.
In many cases however, the first indication of land
will be a single indistinct echo on the display. With a single echo, if any
sort of position is to be obtained then both range and bearing will have to be
used. Apart from the bearing accuracy there must always be considerable doubt
about any position obtained from a single echo. Don’t just assume that the echo
that appears on the display is the target that you are looking for. Soundings
in particular can provide a useful check on any position obtained from a signal
echo. Treat the fix with scepticism until more echoes appear.
One method to plot a position on the chart once
three or more objects appear on the display is to use a sheet of tracing paper.
With the ship’s position marked at the centre of the sheet transfer the true
bearing and range of the echoes on the display to the tracing paper using the
latitude scale from the chart. Place the tracing paper over the chart with the
marked ship’s position near the DR position of the ship and orientate the
tracing paper to true north. Then move the tracing paper around until all the
plotted echoes correspond with the charted features expected to give responses.
The ship’s position is then marked on the chart by pricking through the tracing
paper onto the chart.
A clear plastic plotting sheet known as a radar
station pointer has been specially produced as Admiralty Chart 5028 for this
purpose.
Pilotage
Using radar for coastal navigation
While radar range accuracy is high radar bearing
accuracy is low when compared with visual observations. Therefore the most
accurate radar assisted fixes are obtained in descending order by:
- a combination of visual bearings of prominent objects and radar
ranges
- radar ranges of at least three prominent objects
- radar range and radar bearing of a
single prominent feature.
When selecting prominent coastal features for a
radar range an object which is high and steep to in the direction of the
observer is the best choice and the radar range obtained can be related
directly to the chart with little or no error. Three such objects separated in
bearing by about 45° will produce the most accurate fixes.
No coastal feature should be used in a radar fix
until the feature has been positively identified on the chart. In practice when
coasting what is done is to obtain a fix using three known ranges and at the
same time take a couple of ranges of other points on the display which are
thought to be prominent features. After the three identified objects are
plotted, the others are plotted and if they pass through the position it gives
reasonable proof of identification. After the new objects have been checked in
this way a couple of times they can be used with confidence.
When passing along coasts with off lying dangers a
radar range can be used to pass a danger at a safe distance. This is done by
drawing a range circle on the chart from a prominent feature such as a
headland, then drawing in your DR line tangentially to the danger circle. With
the VRM set at the required distance the vessel can be kept on the intended
track by keeping the heading marker that distance off the headland. This is
even easier to do if you draw a chinagraph line
across the screen, the right distance away from the heading mark and parallel
to it. See figure 10.

In the chart shown above the navigator is fixing
his vessel by using a combination of radar ranges and visual bearings. The
navigator has also taken the added precaution when passing through the narrow
sections between the reefs of plotting range circles from the headlands. By
setting the VRM to the required distance and keeping the radar heading marker
that distance off the headland or even better drawing a line with a chinagraph pencil parallel to the heading marker, the
vessel is assured to travel along the intended track. This technique is known
as blind pilotage or parallel indexing.
Shown below, the navigator has planned his approach
to negotiate the narrow passage between the reefs. The left diagram shows the
radar display superimposed over the chart. The lright
diagram shows the radar display (ship’s head-up) as the
navigator sees it. In the right diagram the VRM has been set to 1 mile and the
navigator has drawn a line with a chinagraph pencil
on the screen just touching the VRM and parallel to the heading marker on the
radar screen. To safely negotiate the passage all the
navigator must do is to con his vessel so as to keep the VRM just touching the
pencil line.

Blind pilotage or
parallel indexing
Blind pilotage or
parallel indexing involves navigating a vessel along a pre-planned track in
waters so confined that conventional methods of navigating (transferring visual
bearings and radar ranges to the chart) is impractical because it cannot not be
done quickly enough. Here radar comes into its own, with some pre-planning, its
graphic presentation, showing the vessels position in the context of its
immediate surroundings can be interpreted by the navigator instantly and the
vessel conned directly from the radar display in daylight or darkness.
A north-up presentation is far superior to
ship’s-head up display for pilotage purposes for the
following reasons:
- the display is orientated to look the same as the surroundings
- the display is stabilised so you do not lose the picture when
altering course, only the heading marker moves
·
the pre-planning process is simplified.
The key to successful piloting is meticulous
planning, preparing well in advance the pilotage plan
of what should happen, what might happen and being prepared for both
contingencies.
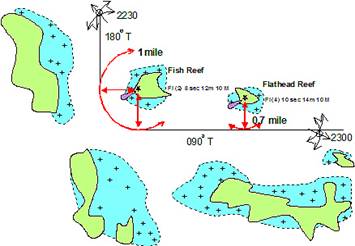
Above is shown a pilotage
plan for negotiating a 90° course change between the reefs. The vessel’s
intending track has been drawn on the chart and the vessel’s position will be
fixed in the normal manner until about one mile from Fish Reef Light. Radar pilotage techniques will be employed from this point. VRM 1
is set to 1 mile and the heading marker kept that distance off Fish Reef Light
or a chinagraph pencil line drawn parallel at a
distance of 1 mile to the heading marker, until the vessel is abeam of Fish Reef Light.
The helm is then put over to port and the vessel
kept at a distance 1 mile off Fish Reef Light until the heading marker with VRM
2 set at a distance of 0.7 miles is that distance off Flathead Reef Light. If
your radar only has one VRM the VRM will have to adjusted
continually between the two settings. Alternatively a chinagraph
pencil line can be drawn on the radar screen.
When abeam of Flathead
Reef Light the vessel’s position will again be fixed in the normal manner.
8. Collision Avoidance
Radar is one of the mariners’ most effective tools,
its immense value rests with its twofold purpose of radar navigation and
collision avoidance. In order to get the greatest value from the radar’s
detecting ability, radar plotting is necessary, rather than just eyeballing the
screen and making assumptions as to the intentions of the other vessel.
By the 1950’s radar was developed widely fitted to
most of the larger commercial vessels. At first, given radars ability to see
through darkness, fog and rain, many mariners believed that there was no longer
a need to reduce speed in restricted visibility. This misconception resulted in
radar assisted collisions, such as the one between the Andrea Doria and the Stockholm and has continued as in
the Tricolor.
These series of collisions demonstrated that the
mariner’s ability to interpret and use the radar information was as important as
the radar itself. At the core of using radar effectively, the operator must
have both, an understanding the radars principles of operation, as well as an
understanding of relative motion.
Early warning of
risk of collision
EBL and VRM
A quick and easy method to establish whether or not
a risk of collision may be developing with another vessel on radar,
is to position the EBL over the centre of the contact, as if to take a bearing
of it. If after two or three minutes the contact appears to be moving towards
the centre of the display and along the EBL, a risk of collision maybe
developing. A radar plot should then be started or the target captured by the
Automatic Radar Plotting Aid (ARPA).

In the sequence above a contact approaching on a
steady relative bearing of 215° is shown. A risk of collision is developing.
Echo Trails
Most modern radars have a feature called echo
plotting or plot. This feature shows the past position of echoes and therefore
the movement of each echo by displaying their previous positions at regular
intervals. The plotting interval can be selected by the operator usually
beginning at 15 seconds to continuous plotting.
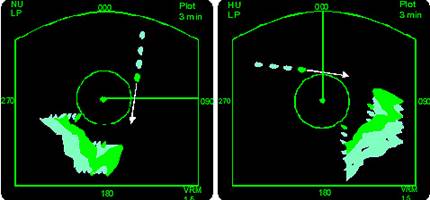
The display on the left represents a north-up
stabilised display and shows a vessel on a course of 090° and a target being
plotted at three minute intervals. Mentally or by using a chinagraph
pencil directly onto the screen, extrapolating the line that the past echoes
have made and adjusting the VRM will give the closest point of approach (CPA),
of the target, in this case 1.5 nm.
The display on the right shows the same situation
but this time with a unstabilised
ship’s head-up display. At times this method of plotting can be very effective,
but at other times particularly with a cluttered display, the picture can
become confusing. Experience is invaluable in assessing the most threatening
targets before commencing plotting.
Guard Zones
Most modern radars have a facility to incorporate a
guard zone on the display which sounds an alarm whenever a contact enters a
predetermined section of the display. The guard zone is set up using the EBL
and VRM. Guard zones can be set up for many reasons, but a common one would be
to give early warning of the approach of another vessel.

A guard zone has been set up to detect targets at a
distance of 2 nm from right ahead to 22½° abaft the beam on either side of the
vessel.
As the target on the starboard side enters the
zone, the alarm will sound alerting the operator to a potentially dangerous
situation.
Reflective
Plotter
A reflective plotter is a removable device that
fits tightly over the radar screen which is then viewed through the plotting
surface with minimal parallax error. The semi-silvered surface reflects the
image of a chinagraph pencil so that it always appears
directly above the target. The device can be used to advantage when using
parallel indexing techniques in coastal navigation. It can also be used with a north-up radar when plotting to draw the OA track of a
target directly onto the display. The reflective plotter has the advantage that
the navigator need not measure ranges and bearings and transfer then to another
plot, improving plotting time and avoiding some risk of error.
Relative Motion
The navigator’s primary concern is the safe
navigation of his/her vessel to its destination. To accomplish this, fixed
hazards such as reefs must be avoided. To do this, the actual or geographical
position of the vessel must be known.
Also during the course of a voyage, other moving
hazards, such as vessels will be encountered, and the navigator will have to
deal with a second type of motion during the voyage. This second type of motion
deals with the apparent movement of moving objects and is known as relative
movement.
Relative movement is motion measured with respect
to a specified object, which may or may not be moving itself. For example, if
two vessels are proceeding on the same course and at the same speed. Both
vessels will have actual (geographical) movement, but relative to each other
they will appear to be stationary.

Relative motion summary
· Stationary floating objects will move on the radar screen parallel with our course, in a reverse direction, and at our speed.
·
Moving objects will not show their true movement on the radar
screen.
·
Moving targets on the radar screen will have a movement which is a
combination of their course and speed and our own ship’s course and speed.
·
Vessels on collision courses will have a movement towards the
centre of the radar screen.
The navigator, primarily to avoid collision, must
accurately and quickly solve the problem of the relative movement of other
vessels underway and relate that movement to the chart. This could be done by
trigonometry, but is quicker and easier to do by geometry.
Radar Plotting
Radar plotting instruction is found in the companion text found at:
http://www.splashmaritime.com.au/Marops/data/text/Radartex/Radarplottex.htm